13 oktober 2022
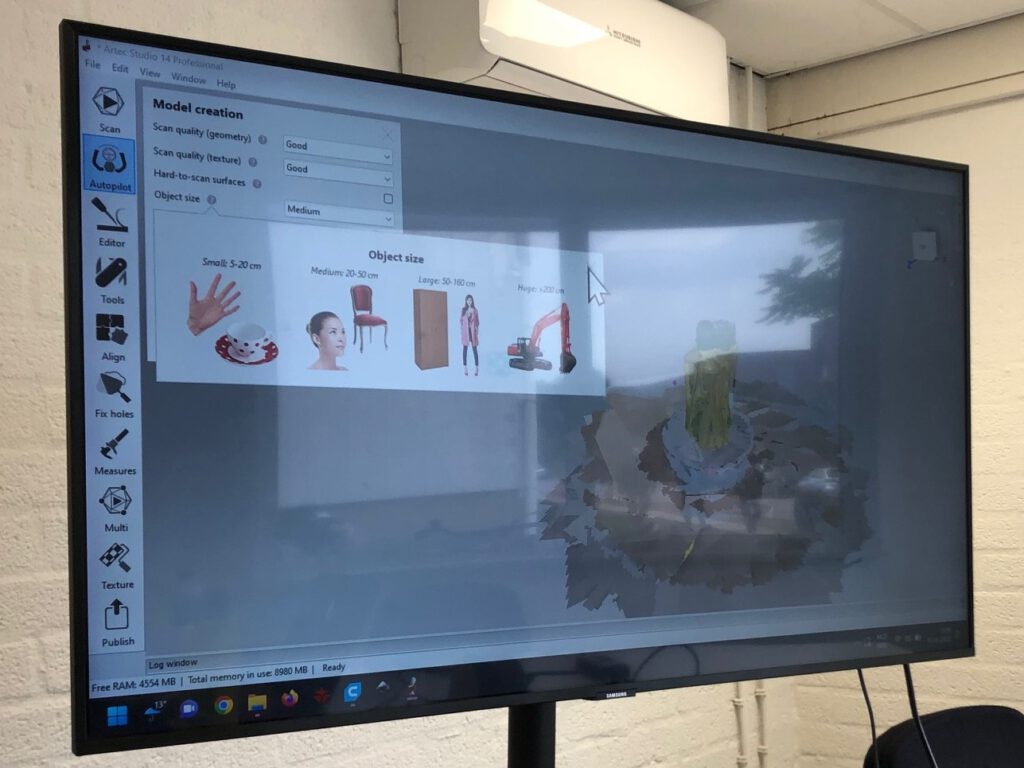
Kennisoverdracht en kennisdelen is één van mijn diensten waarbij mijn vaardigheden als trainer en consultant samenkomen. Het begrijpen van de specifieke kennisbehoefte en de plaatsing daarvan in de bedrijfscontext is belangrijk om ervoor te zorgen dat kennis relevant is en praktisch toegepast kan worden. In deze 3 uur durende sessie neem ik de opdrachtgever mee in het proces van 3D scannen van gebogen oppervlakten- gebruik makend van een professionele Artec Eva Fast 3D scanner.
Het doel is tweeledig: enerzijds wil de opdrachtgever het proces van 3D scannen leren begrijpen en zelf uitvoeren om zodoende tegen praktische problemen aan te kunnen lopen. Anderzijds wil men een scan-file hebben van een gebogen oppervlak om daarmee en perfect passende vacuümgrijper te kunnen maken om objecten op te tillen en naar de gewenste plek te verplaatsen. Perfect passend is belangrijk, omdat er per minuut tot wel 100 pickings plaats moeten kunnen vinden.
Tijdens deze kennissessie ga we stap voor stap in op de verschillende componenten: van het aansluiten van de 3D scanner en het opstellen van het draaiplateau naar de werking van het scanprogramma. Vervolgens gaan we de 3D file inlezen in Inventor en Fusion360. En kijken we samen naar de resultaten en beoordelen we de scankwaliteit.
Tim:
“Het was voor mij een leerzame en leuke sessie!
Wij hebben nu een goed beeld van het 3d scannen.“
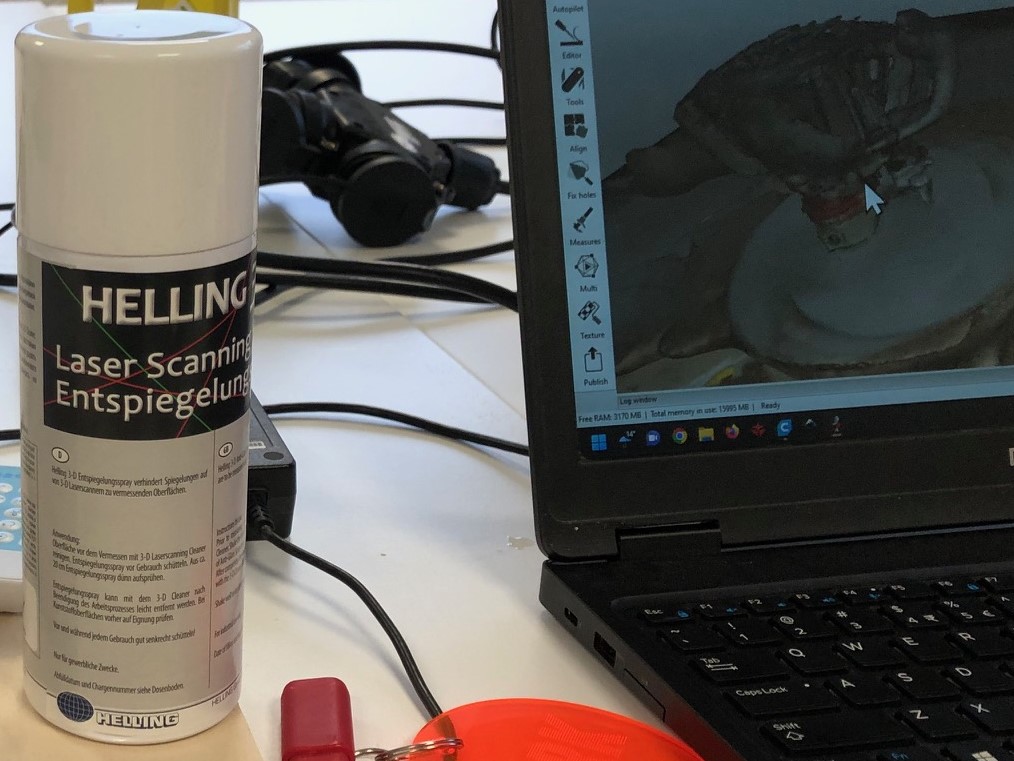
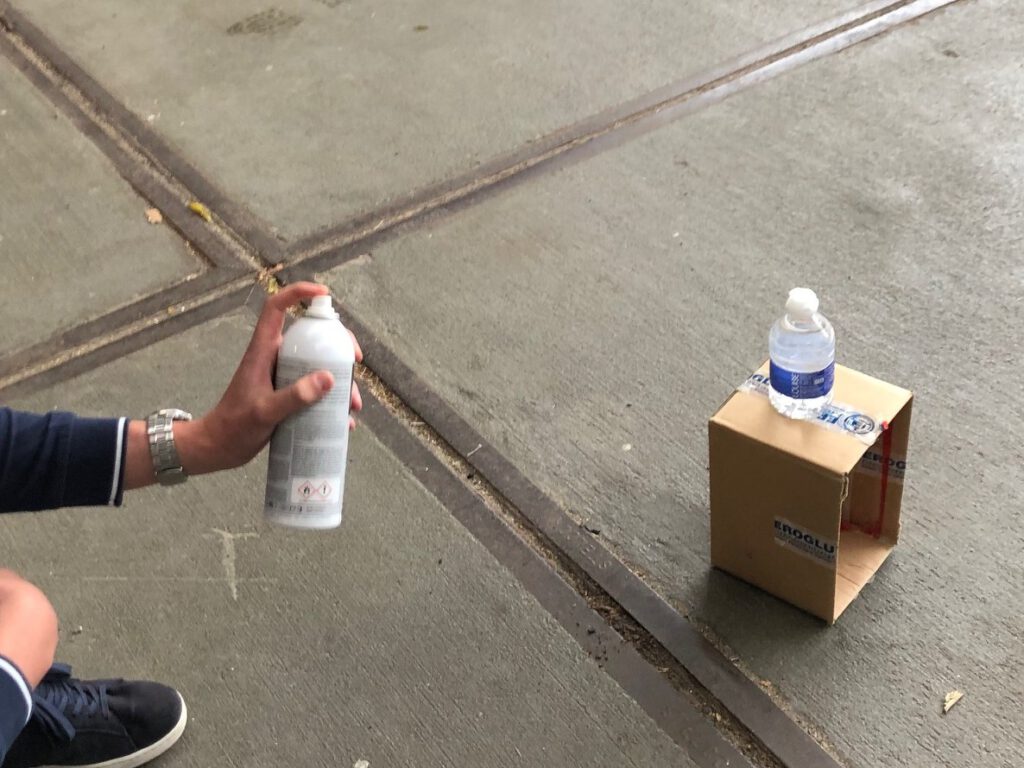
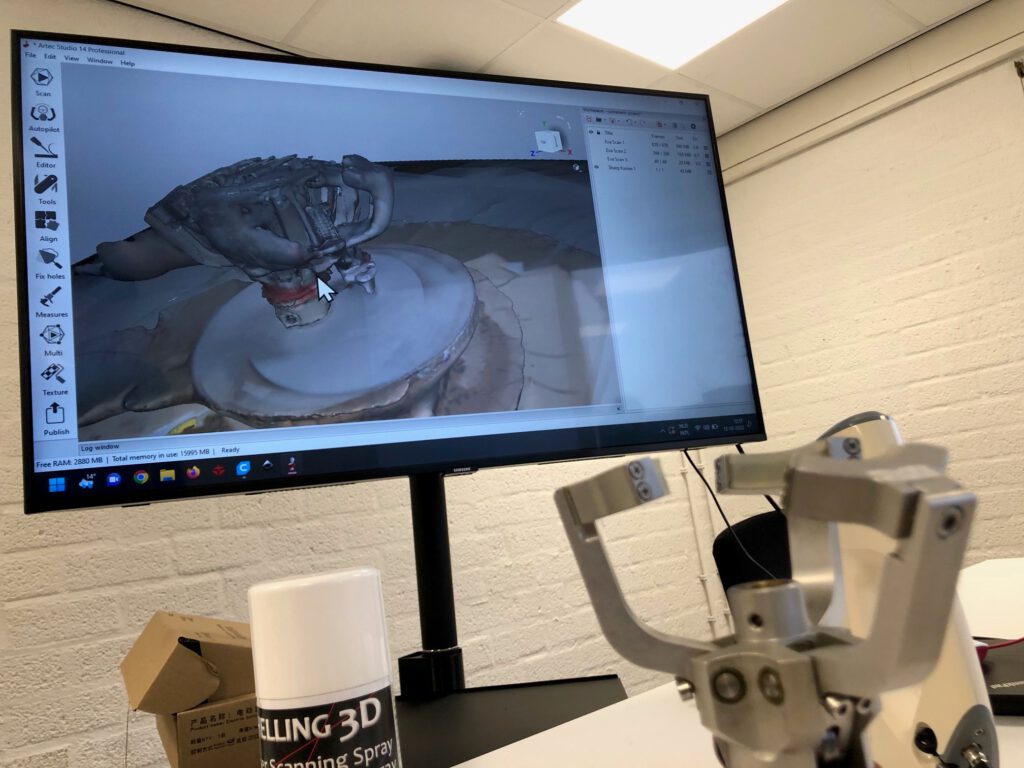
Om het toepassingsgebied van 3D scannen verder te verkennen, gaan we ook een transparante fles en een aluminium grijper scannen. Dit zijn beide lastige objecten vanwege de reflecties. Maar met behulp van de ontspiegelingsspray weten we de fles alsnog te scannen en om te zetten in een STL file met duizenden polygonen. De grijper is minder succesvol, waarschijnlijk omdat we hierbij te weinig onderscheidende visuele referentiepunten aangebracht hebben. Goede kennis en handig om alvast als ervaring opgedaan te hebben voor in de toekomst.