22 December 2025 –
Aanleiding LightOnLabs ‘2026
Eerder deze maand kreeg ik de vraag of ik mogelijkheden zag voor het ontwikkelen van een interactief lichtobject voor de kunstenaar Ster Borgman (https://sterborgman.nl/) bij wie het onderzoeken van natuurlijke processen en de transformerende kracht van materialen centraal staat. Als een soort alchemist transformeert, extraheert en verbindt Ster chemie: pigmenten uit planten, zand dat tot glas wordt gesmolten en roest die verandert in druipende rode glasvormen. Met dit werk wil Ster verwondering oproepen voor de niet-menselijke natuur.
De vraag van de kunstenaar
De concrete wens is een driver voor een LED-strip die onderdeel wordt van het lichtobject. Deze driver moet reageren op de aanwezigheid van mensen en idealiter varieert de lichtintensiteit met de afstand tot het object. Op zo’n 1,5 tot 2,5 meter moet het object langzaam opgloeien, terwijl het bij minder dan 30 centimeter volledig in gloei staat. Door meerdere objecten samen in dezelfde ruimte te plaatsen ontstaat zo een vloeiend, interactief lichtlandschap.


Sensorische uitdaging
Dit roept direct praktische vragen op: hoe detecteer je menselijke aanwezigheid achter een glazen structuur? Glas breekt licht en weerkaatst geluid, waardoor optische en ultrasone sensoren afvallen. Wat logisch overblijft is electro-magnetische radar. Een LD2410C-radarsensor detecteert met microgolven beweging en aanwezigheid, werkt onafhankelijk van licht en geluid en functioneert zelfs betrouwbaar door dunne materialen heen.
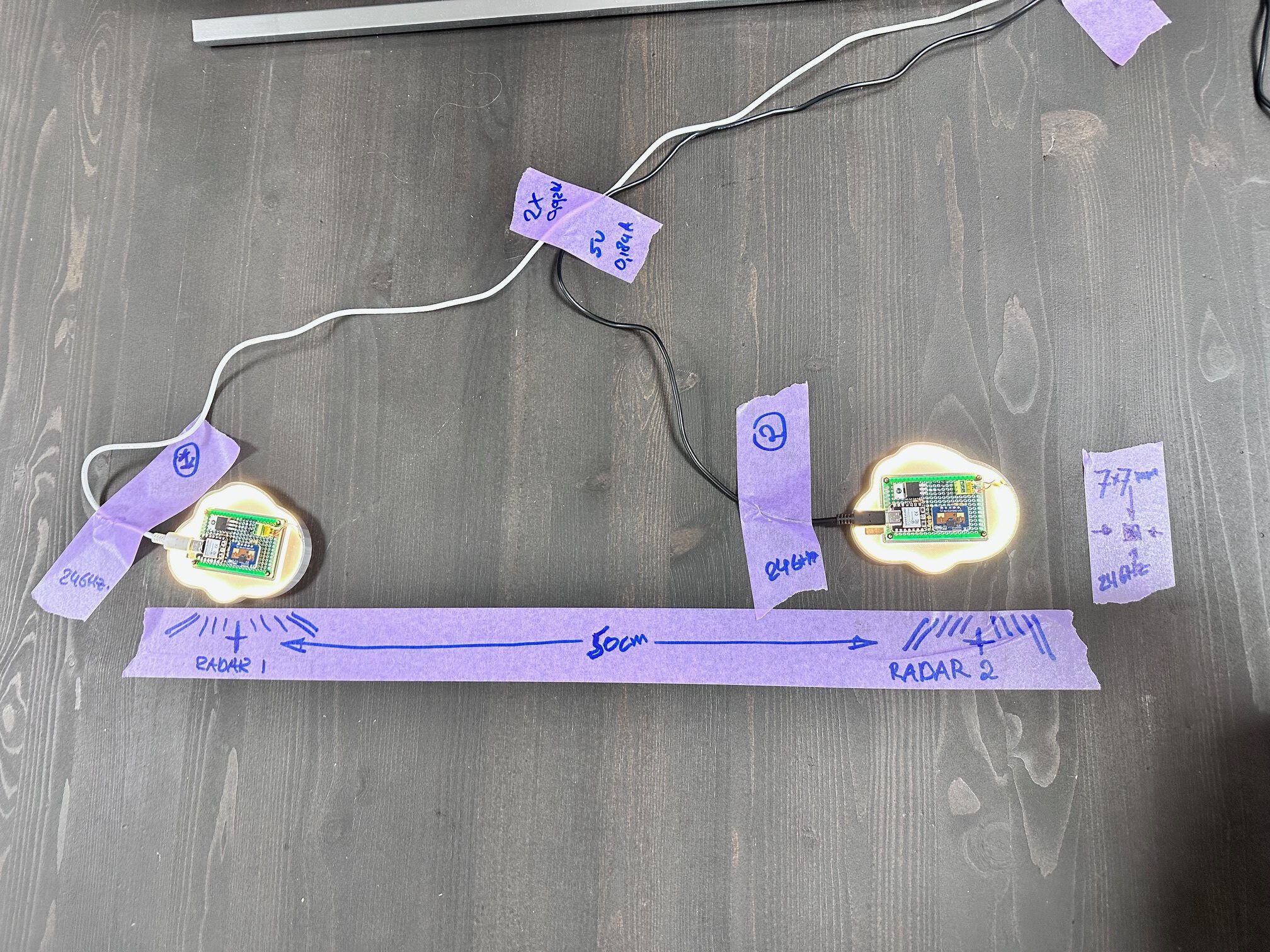
Meerdere objecten, één ruimte
Omdat er meerdere lichtobjecten in een relatief kleine ruimte geplaatst worden, is de kans op onderlinge interferentie een belangrijk aandachtspunt. Het gaat om ongeveer tien objecten, verticaal gemonteerd aan de wand. Voordat alles definitief gebouwd wordt, stel ik voor om eerst twee werkende sensoren te realiseren en in de praktijk te testen of deze aanpak zonder storingen werkt.
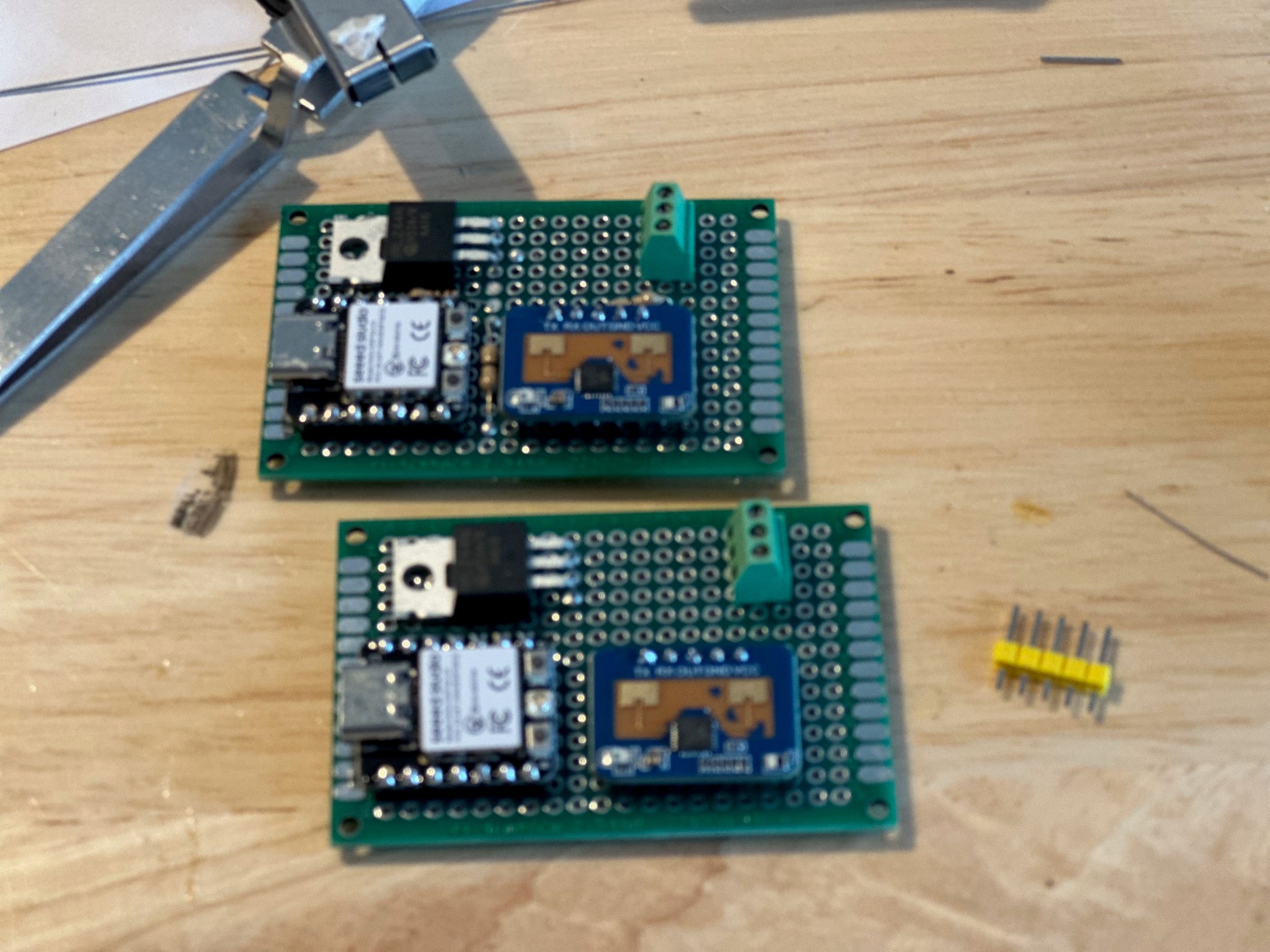
Benodigde onderdelen voor prototype
Voor het ontwikkelen van het prototype van deze electro-magnetische RADAR sensor LED driver zijn de volgende componenten nodig:
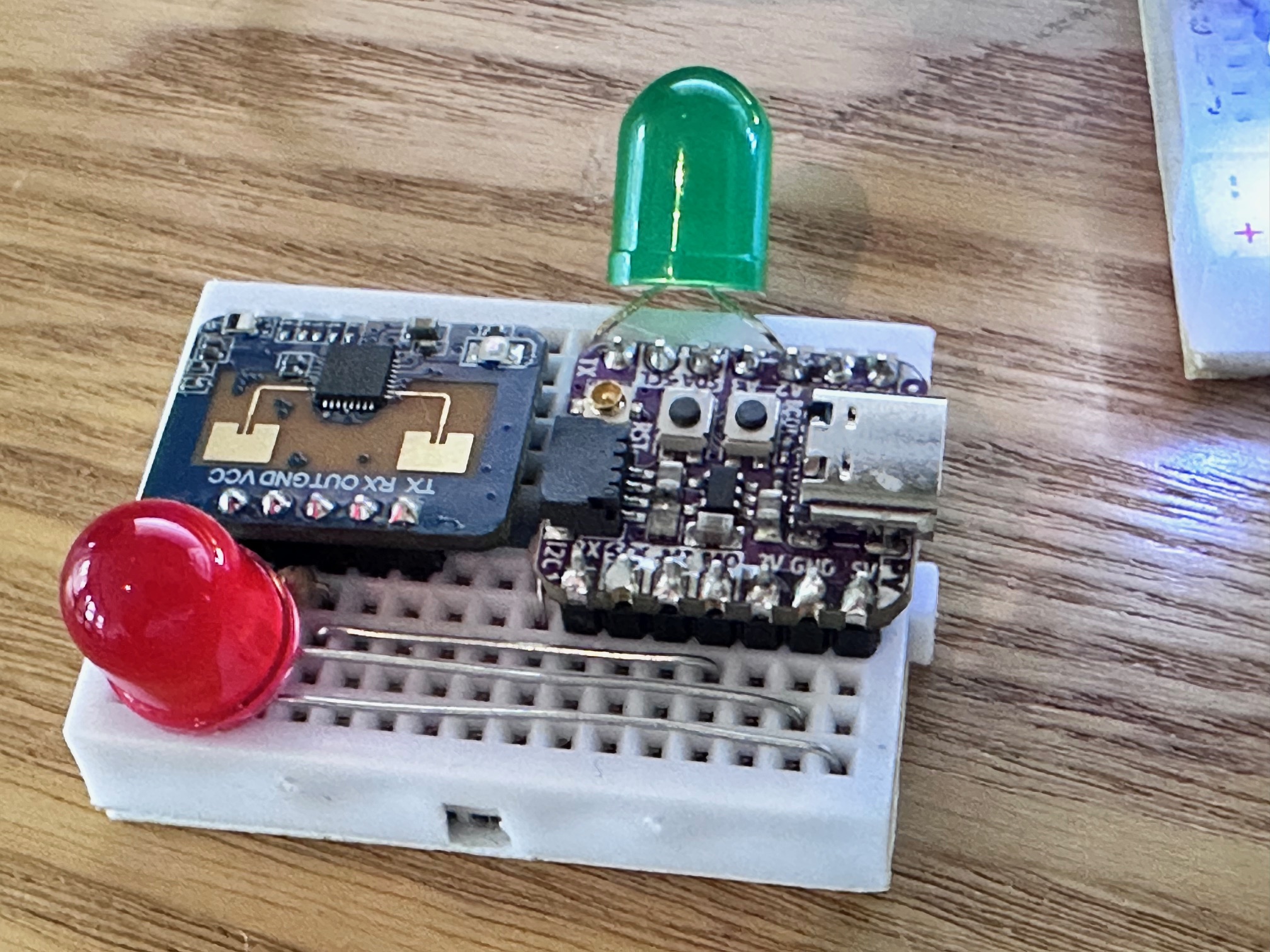
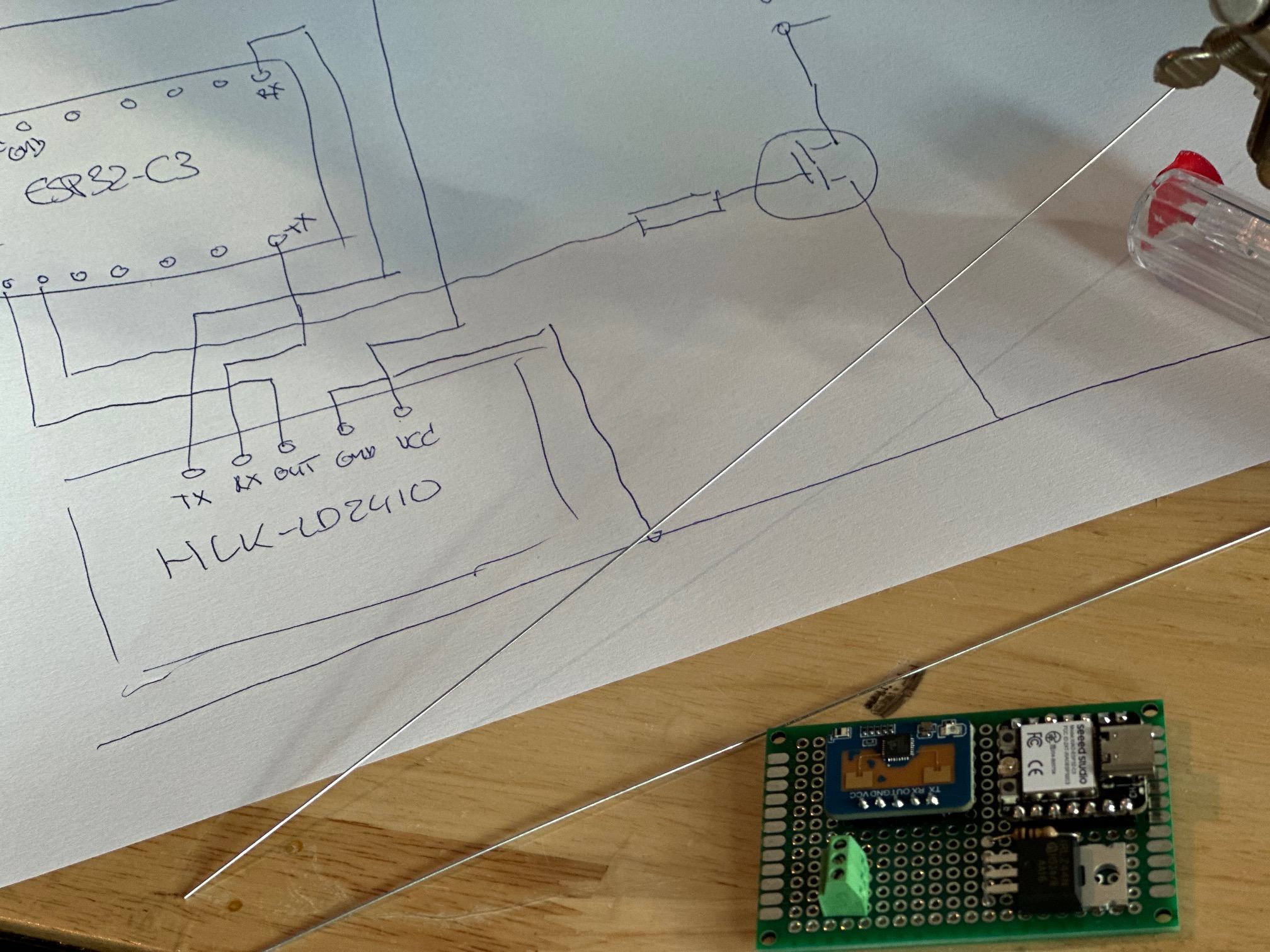
– Hi-Link LD2410C radar sensor
– HLKRadarTool app op mobiel
– Seeed Studio XIAO ESP32C3
– IRLZ44N N-Channel Power MOSFET 55V/47A
– 2N7000 FET 60V/200mA
– 100 Ohm weerstand
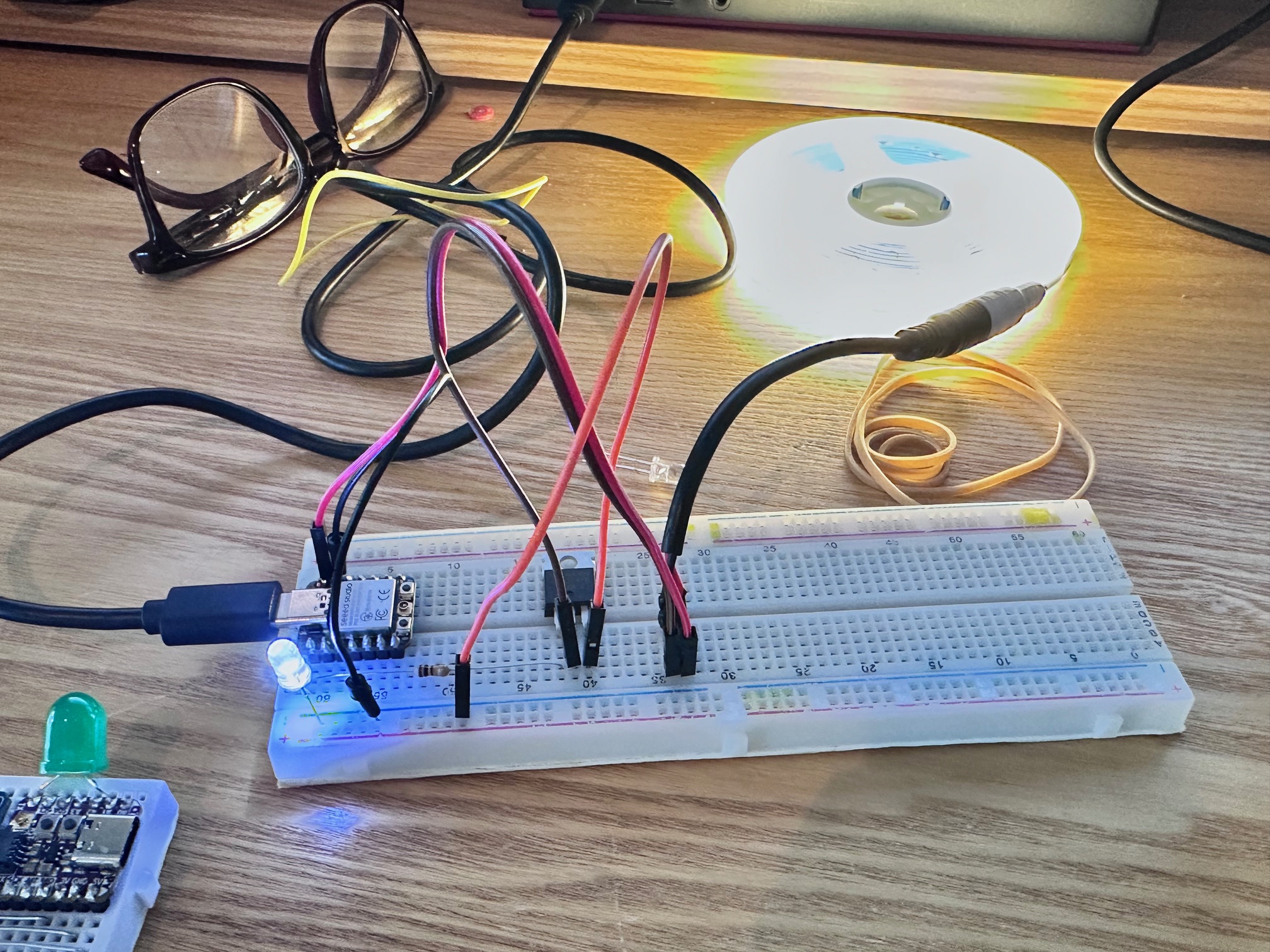
– Mini breadboard
– 2 LEDs met 220 Ohm weerstand
– COB LED strip 5v, 3000K
– Experimenteer printplaat 4x6cm dubbelzijdig
– Schroefterminal Block Connector 3Pin 2.54mm
– 3D print bracket printplaat en lichtstrip
– 3m USB-C kabel met NFHK 90 graden datakabel
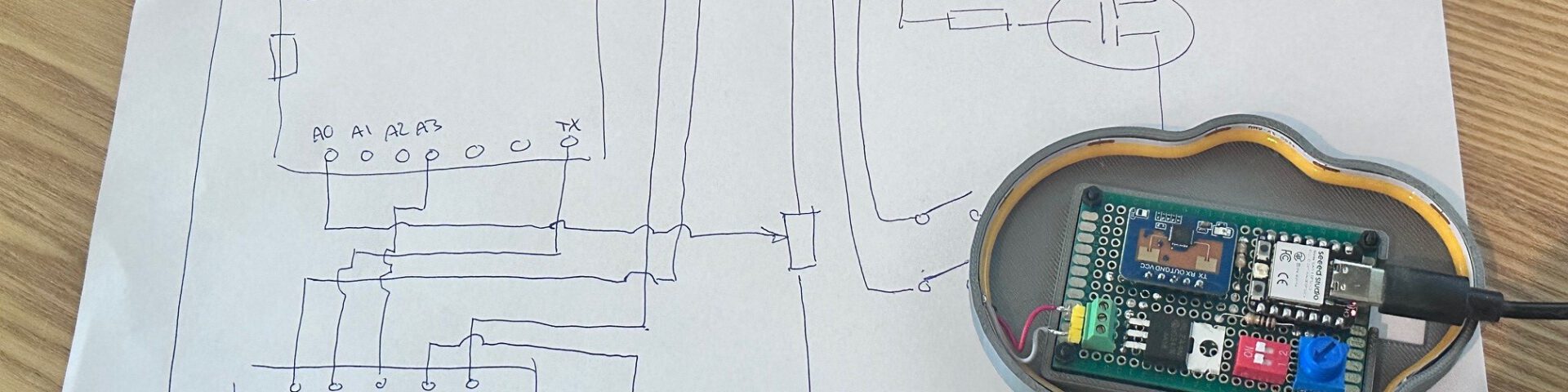
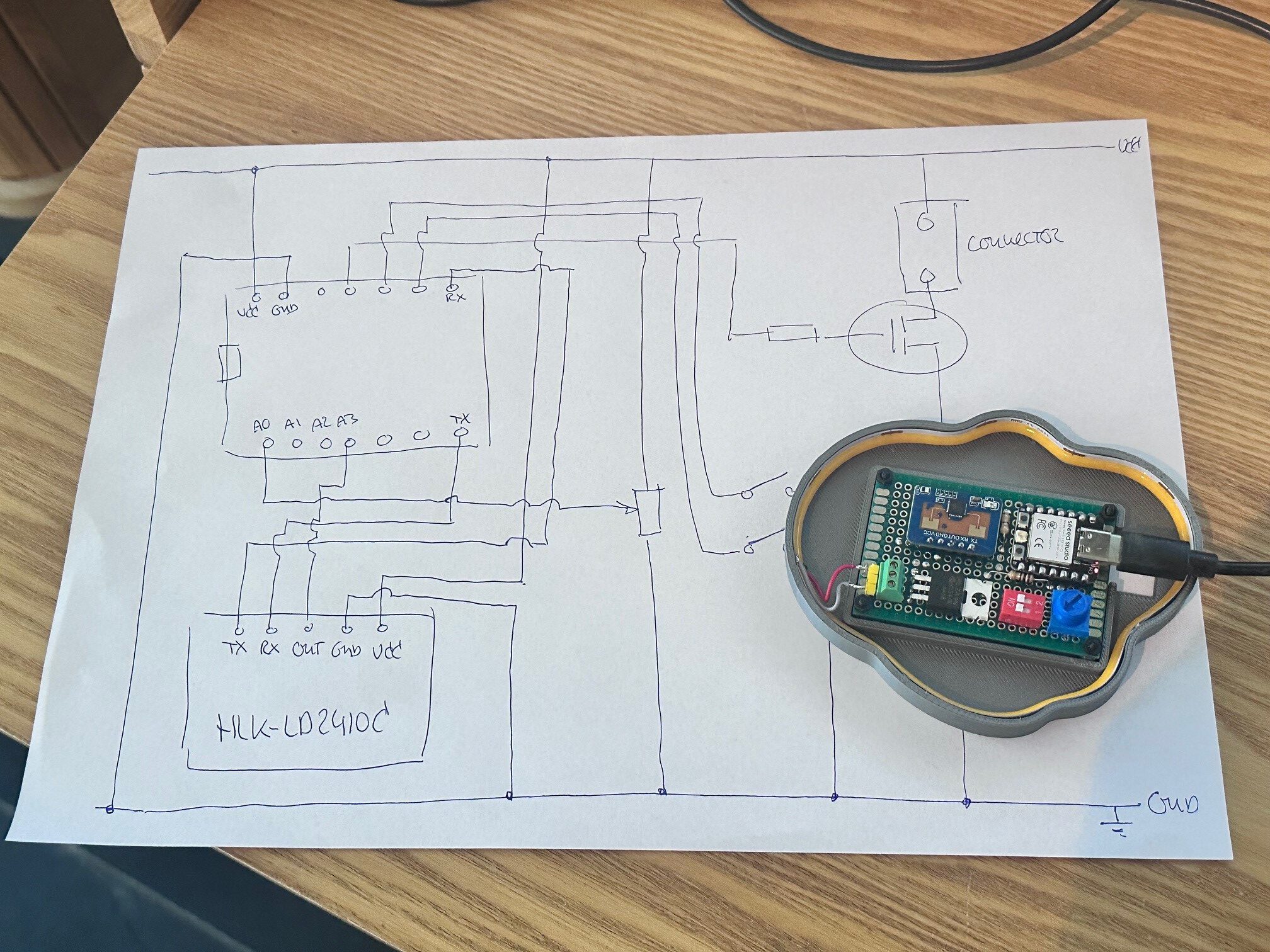
Techniek van de radarsensor
De LD2410C is ontwikkeld als compacte mmWave-radarmodule en vormt een modern alternatief voor PIR- en ultrasoonsensoren. De sensor beschikt over een eenvoudige aan/uit-uitgang én over een snelle UART-interface waarmee afstandsdata kan worden uitgelezen. Deze seriële communicatie draait op hoge snelheid en vraagt om zorgvuldige hardware- en software-integratie.
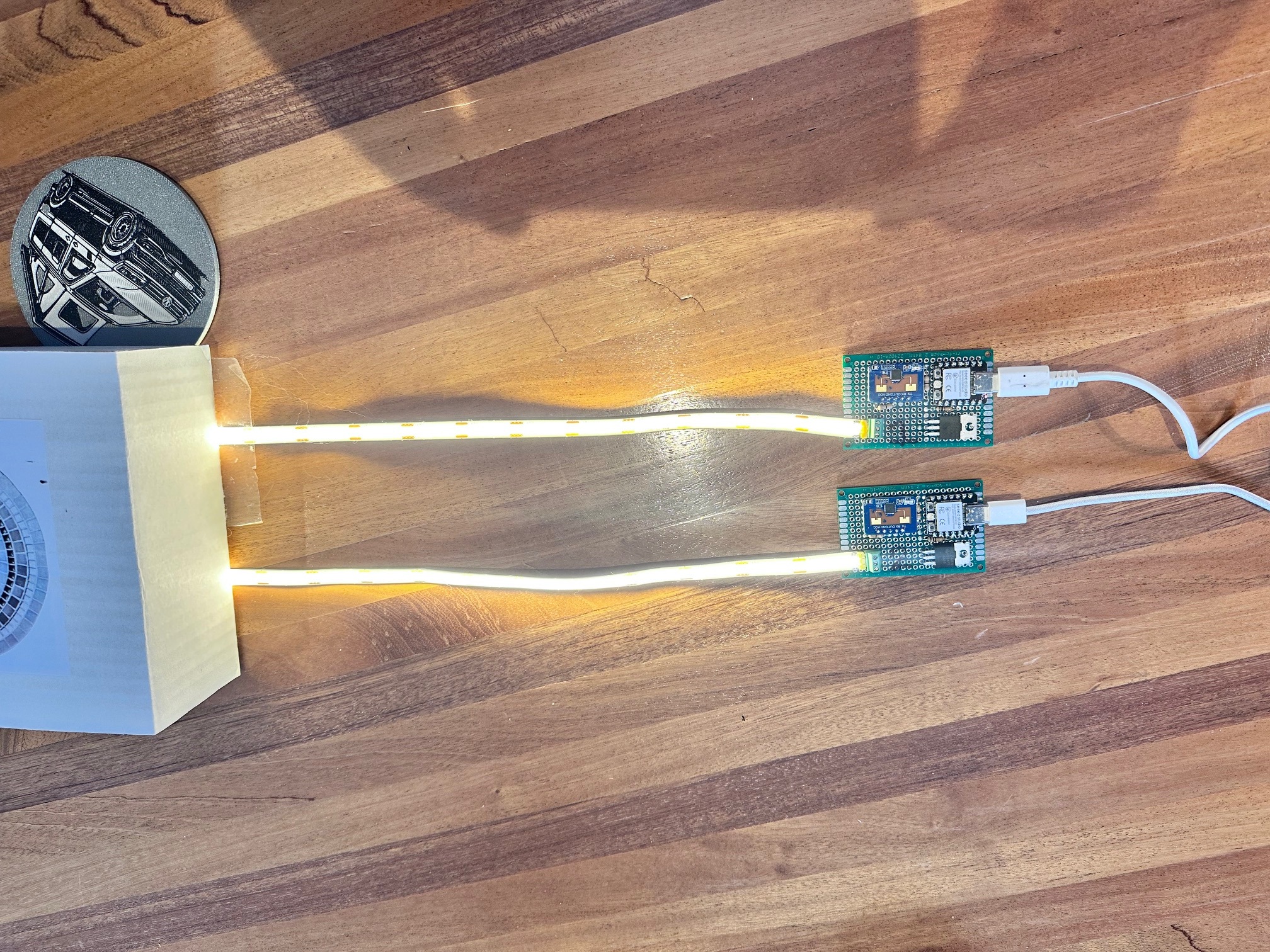

Licht en vermogen COB LED strip
De LED-strip zelf moet een egaal warmwit licht van circa 3000K geven, zonder zichtbare pixels. Dat betekent veel LEDs en dus een relatief hoog vermogen. Rechtstreeks schakelen vanuit de sensor is geen optie. Daarom kies ik voor een MOSFET-oplossing: efficiënt, snel en met minimale warmteontwikkeling, én geschikt om via PWM de lichtintensiteit nauwkeurig te regelen.
Logica en gedrag
Het meest complexe deel zit in de aansturing: welke logica koppel je aan de sensordata? Globaal betekent dit dat bij detectie van aanwezigheid het licht langzaam opschaalt, na volledige oplichting blijft branden zolang iemand aanwezig is, en bij afwezigheid weer gecontroleerd afdimt. Ook tussentijdse veranderingen in aanwezigheid moeten natuurlijk aanvoelen en geen schokkerig lichtgedrag veroorzaken.
Keuze voor embedded platform
Om deze logica betrouwbaar te realiseren is een embedded processor nodig. Vanwege de beperkte ruimte en de benodigde rekenkracht kies ik voor een XIAO ESP32-C3. Deze compacte controller programmeer ik in C++ en leest continu de afstandsdata uit de radarsensor. Spikes worden genegeerd, nulwaarden vastgehouden en met een low-pass filter van circa een halve seconde ontstaat een vloeiende lichtrespons.

Complexiteit in samenhang
De echte uitdaging zit in het stabiel combineren van al deze elementen. Radardata is per definitie grillig, terwijl het lichtgedrag juist rustig en vanzelfsprekend moet aanvoelen. Kleine keuzes in filtering, timing en PWM-aansturing hebben grote invloed op het eindresultaat. Daarbij komen nog hardware-aspecten als snelle seriële communicatie, voeding en vermogensschakeling. Pas wanneer software en hardware als één systeem zijn ontworpen, werkt dit betrouwbaar.
Gefaseerde ontwikkeling
De eerste versie die ik oplever richt zich op aanwezigheid, nog niet op afstand. Met instelbare op- en afschaaltijden ontstaat zo een robuuste LED-driver waarmee onderlinge interferentie getest kan worden. In een volgende stap wordt afstand wél een bepalende factor voor de lichtintensiteit, wat complexere filtering van radardata vereist.
Waarom dit boeit
Het mooie aan dit soort projecten is dat er geen bestaand voorbeeld is. Het is een open ontwikkelveld waarin techniek, creativiteit en experiment samenkomen. Juist het werken met kunstenaars, die vanuit een totaal ander perspectief denken en maken, maakt dit soort trajecten voor mij extra interessant en inspirerend.