
22 Januari 2026 –
Start van het programmeertraject
Begin deze maand ben ik samen met een medewerker van de opdrachtgever gestart met het programmeren van een robothond voor geautomatiseerde inspectie op nieuwbouwlocaties.

Waarom robotisering juist in de bouw logisch is
Robotisering gaat de komende jaren het werkveld echt veranderen en kan bovendien helpen bij het personeelstekort. Zeker in de bouw, waar continu monitoring nodig is op veiligheid, voortgang en duurzaamheid. Dat monitoren is arbeidsintensief, sterk repeterend en op sommige plekken ook gewoon onveilig om handmatig te doen. Een autonoom sturende robot kan juist wél locaties of situaties betreden waar je als mens liever niet (of niet meer) komt.

De kernvraag van de opdrachtgever
De gedachte van de opdrachtgever is eigenlijk simpel: wat nou als inspecties grotendeels geautomatiseerd door een robot kunnen plaatsvinden? In dit project gaat het om een Unitree Go2W robothond die zelfstandig inspectierondes loopt op de bouwplaats: controleren, meten, registreren en rapporteren. En als die robot toch rondrijdt, dan is het logisch om hem meteen uit te breiden met sensoren waarmee o.a. temperatuur, luchtvochtigheid, wind en geluidsniveaus kunnen worden geregistreerd en later geanalyseerd.
Rolverdeling en focus van mijn ondersteuning
Het ontwikkelen van autonome robots vraagt specialistische kennis, zeker als je sensordata moet afvangen, interpreteren en omzetten naar actiegerichte beslissingen. De opdrachtgever is inhoudelijk sterk in bouwkundige kennis en praktijkervaring. Mijn ondersteuning in dit traject zit in het programmeren van de hond uitgevoerd met camera en sensoren, met als einddoel: zelfstandige inspecties in een continu veranderende omgeving, waarbij foto, video en sensordata structureel worden verzameld.

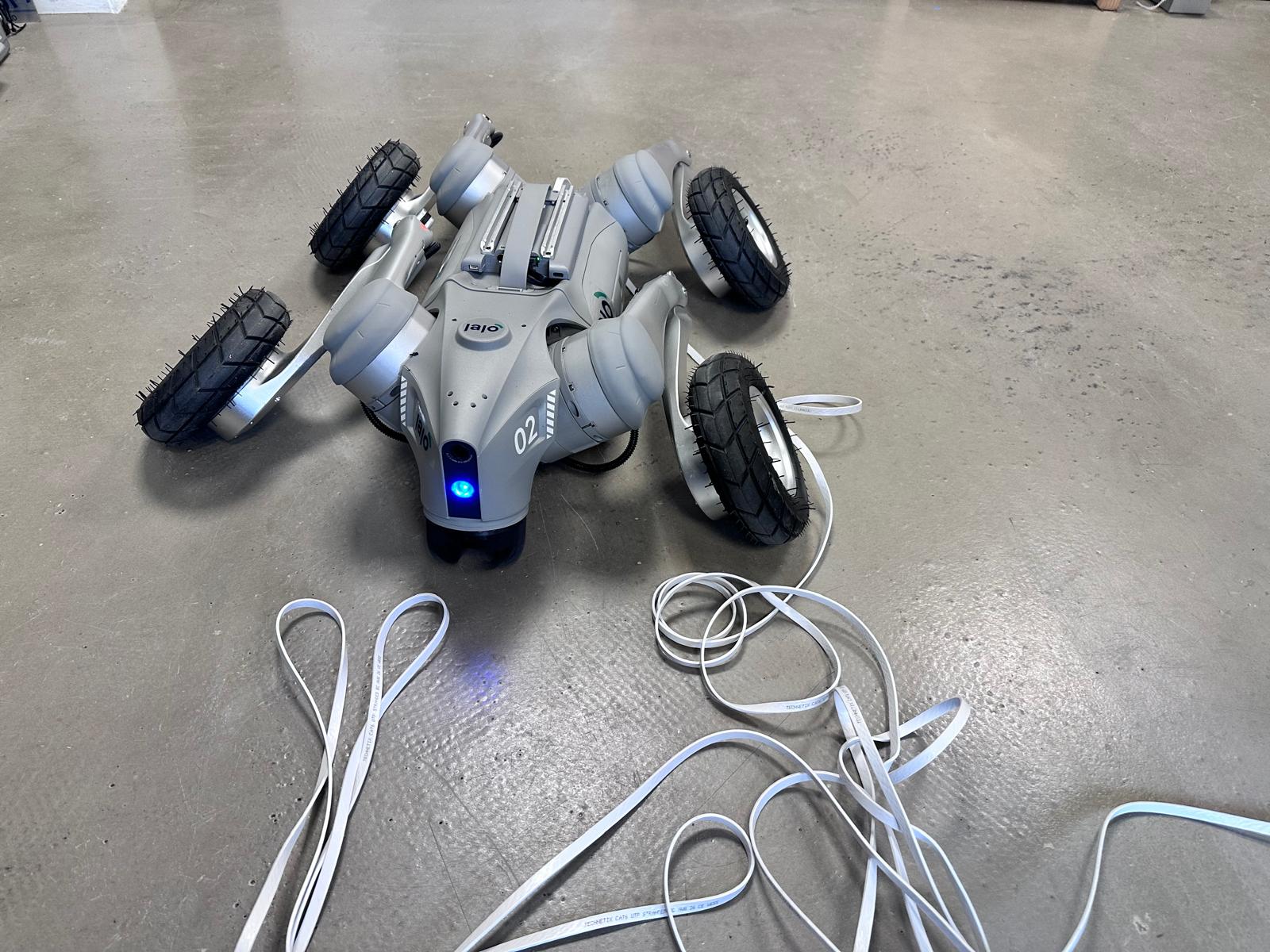

De Go2W als mobiele inspecteur
De robothond die wordt ingezet is een Unitree Go2W: een robothond op wielen, ontworpen om autonoom en veilig te bewegen in de echte wereld. In plaats van poten gebruikt de Go2W wielen, waardoor hij sneller, stabieler en energiezuiniger grotere afstanden kan afleggen. Dat maakt hem geschikt voor inspectierondes op bouwplaatsen, terreinbewaking en het monitoren van veiligheid en voortgang. Dankzij sensoren zoals camera’s en LiDAR kan hij obstakels detecteren, routes volgen en data verzamelen — in de praktijk: een mobiele inspecteur die meet, registreert en rapporteert.
Autonome navigatie met SLAM
Voor autonoom navigeren wordt gebruik gemaakt van SLAM (Simultaneous Localization And Mapping). Bij de Unitree Go2-W is dit het “ik-weet-waar-ik-ben”-systeem: terwijl de robot rondrijdt maakt hij tegelijk een kaart van de omgeving én bepaalt hij continu zijn eigen positie daarin. Dat gebeurt door sensordata (LiDAR + IMU en soms camera/depth) slim te combineren, zodat de robot ook zonder GPS binnenshuis of tussen gebouwen kan navigeren, obstakels kan ontwijken en routes kan plannen.

Ontwikkelplan in overzichtelijke bouwblokken
In het ontwikkelplan voor autonome bouwplaatsinspectie heb ik het traject opgedeeld in logisch afgebakende blokken om focus en voortgang te bewaken:
– Basisopstelling en hardware-integratie: 360-camera monteren, voeding en bevestiging
– SDK- en ROS-omgeving configureren: Go2 SDK + Robot Operating System inrichten
– Sensor- en camera-data integreren: 360-video en sensordata synchroniseren
– Kaart en paddefinitie opstellen: kaart maken en routes vastleggen
– Autonome navigatie ontwikkelen: autonoom rijden met obstakelvermijding
– Periodieke missieplanning automatiseren: inspectieroutes automatiseren en loggen
– Test, optimalisatie en veiligheidscheck: testen, tunen en failsafe controleren
Benodigdheden voor autonome inspectie op bouwlocaties
Voor deze ontwikkeling van autonome inspectie in bouwlocaties zijn de benodigdheden:
– Robot: Unitree Go2W, accupack(s) en transportkist
– Sensoren: inspectie camera (foto/video), 360-camera, thermische camera (optioneel)
– Software: Unitree SDK, CycloneDDS/ROS2, Ubuntu, PyCharm
– Randvoorwaarden: veiligheidsplan, connectiviteit (WiFi/5G), processen en KPI’s

De softwarestack: SDK + Ubuntu + CycloneDDS/ROS2
Voor het programmeren wordt gebruik gemaakt van de Unitree Go2W SDK (Software Development Kit): een gemixte omgeving met zowel C++ als Python componenten. Binnen een dedicated Ubuntu omgeving wordt een workspace opgezet en een virtual environment aangemaakt. Vervolgens moet CycloneDDS gebouwd en geïnstalleerd worden: een essentieel onderdeel dat als communicatie-motor alles realtime met elkaar laat praten (sensoren, control, navigatie). Als CycloneDDS stabiel en goed afgesteld is, werkt de robot soepel; als het rommelt krijg je latency, dropouts en vage netwerkproblemen.
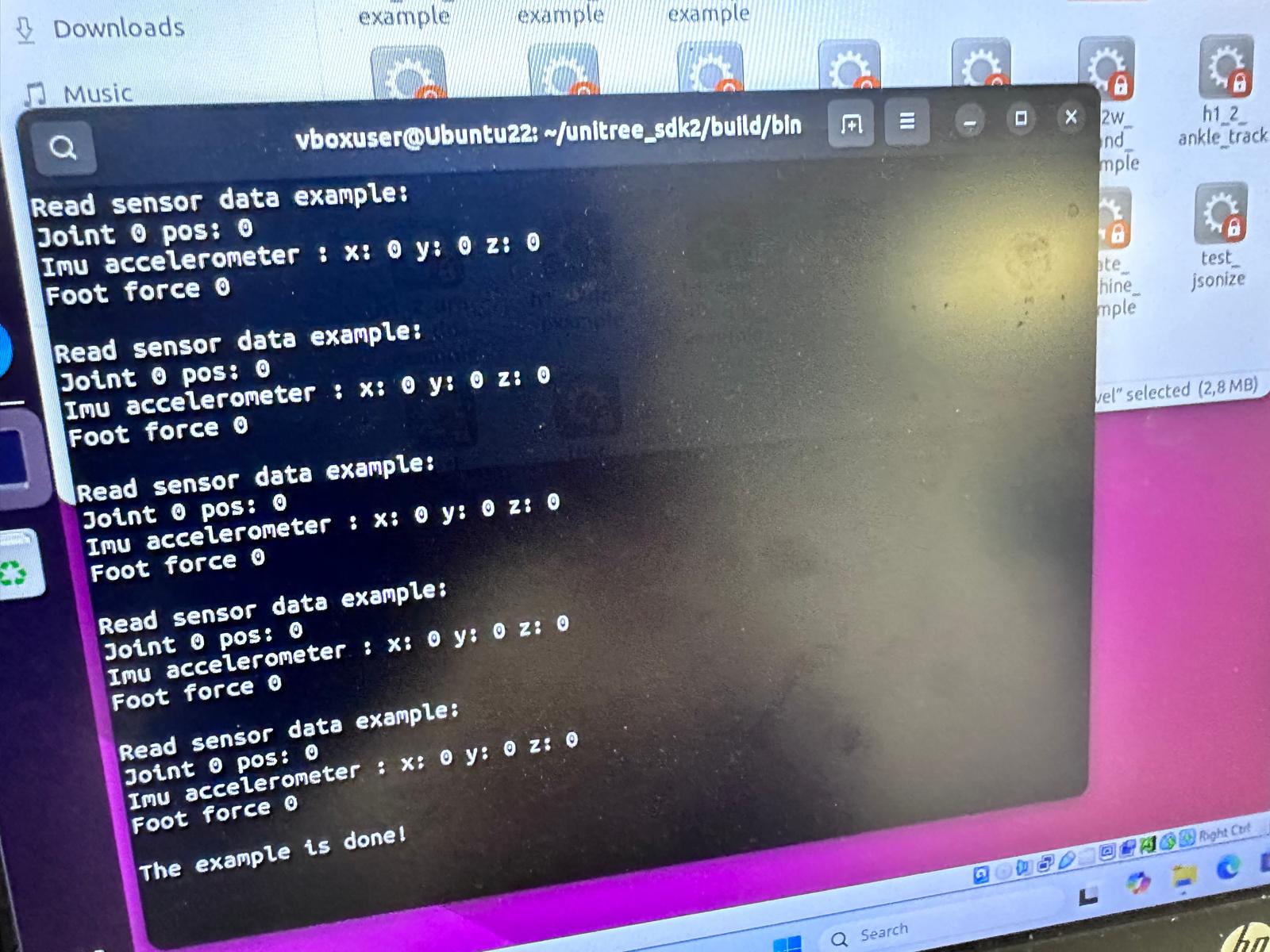
Eerste SDK-stappen en de ‘twee kernels’ van de Go2W
In de Unitree SDK zijn voorbeelden aanwezig voor functies zoals staan, zitten, lopen, draaien, obstacle avoidance toggle en video capture. Dit zijn eigenlijk de ‘Hello World’-stappen van een geprogrammeerde robothond. In de eerste setup blijkt de connectie naar de hond wat verwarrend, mede omdat de Go2W met twee kernels werkt: één voor low-level real-time motion control (motoren, stabiliteit, veiligheid) en één AI/Application kernel voor de high-level laag (o.a. SLAM en autonomy). De eerste kernel zorgt dat de hond altijd stabiel en veilig blijft bewegen, de tweede kernel bepaalt het gedrag: wat hij moet doen en waar hij heen moet. De eerste stappen zijn gezet: we hebben vanuit Python scripting de eerste commands door Go2W uit laten voeren. De volgende stap is vertrouwd te raken met de SDK en vervolgens het betrouwbaar afvangen van video- en sensorfeedback, zodat we het ontwikkelpad verder kunnen doorlopen richting autonome inspectierondes.

Spin-off: workshop ‘kennismaking robotica’ voor SPARK Campus
Als spin-off van het ondersteunen van deze programmeeractiviteit ontwikkel ik voor SPARK Campus ook een workshop ‘kennismaking robotica’ als duidelijke en laagdrempelige instap voor deelnemers met verschillende voorkennis. Daarmee start iedereen met dezelfde basis (begrippen, veiligheid, sensoren/actuatoren) en wordt nieuw opgedane kennis heel praktisch direct omgezet in eigen ervaring met het besturen van de robothond tijdens de workshop. Daarmee is deze workshop een concrete uitbreiding van het trainingsportfolio van SPARK Campus, waarmee nieuwe innovatieve technieken laagdrempelig toegankelijk worden voor bedrijven en studenten.

Waarom ik dit soort trajecten graag doe
Ik vind het erg leuk om bij te kunnen dragen aan het inzetten van innovatieve tools — zeker wanneer die nog in de kinderschoenen staan en in een prototypefase zitten voordat ze echt breed toepasbaar worden.