2 april 2024
Met grote regelmaat kom ik in projecten de vraag tegen of en hoe een object gecontroleerd elektronisch verplaatst kan worden. Een handige oplossing hiervoor is het inzetten van een zogenaamde schaarlift. De schaarlift bestaat uit meerdere gekoppelde armen die openen en sluiten als een schaar. Hiermee kan op eenvoudige wijze een platform worden gecreëerd waarop een last verticaal of horizontaal verplaatst kan worden.
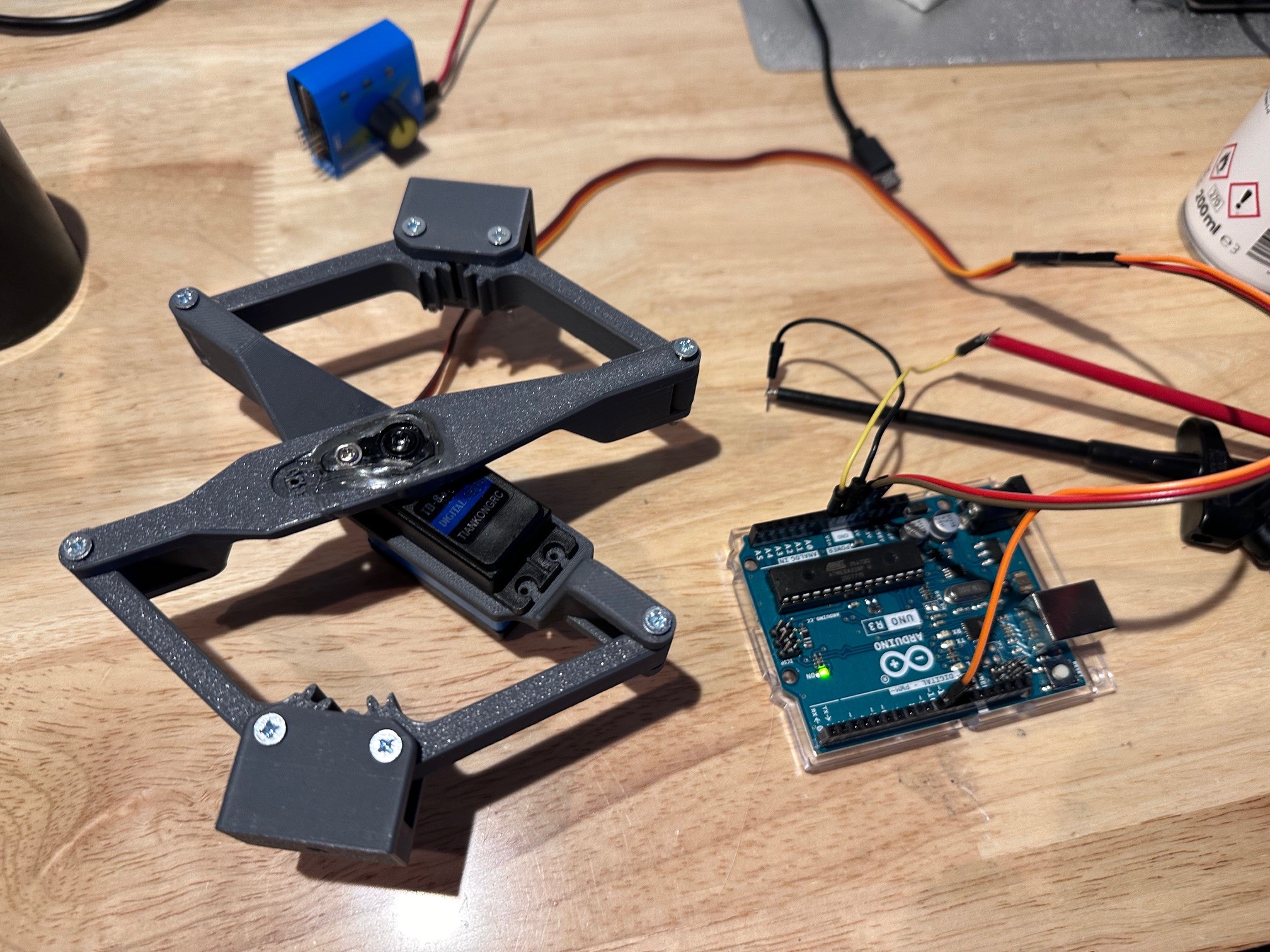
Voor mijn proof of concept ben ik op zoek naar een eenvoudige opstelling waarmee ik een werkende, toonbare demonstratie kan geven van de werkwijze en de nauwkeurigheid van de aansturing. Voor het plaatsen of verplaatsen van objecten is het van belang dat van een bekende actuele positie een verplaatsing kan plaatsvinden naar een gewenste positie. Een ideale aansturing hiervoor is een servomotor in combinatie met een Arduino, ESP32 of Raspberry Pi of Pico.
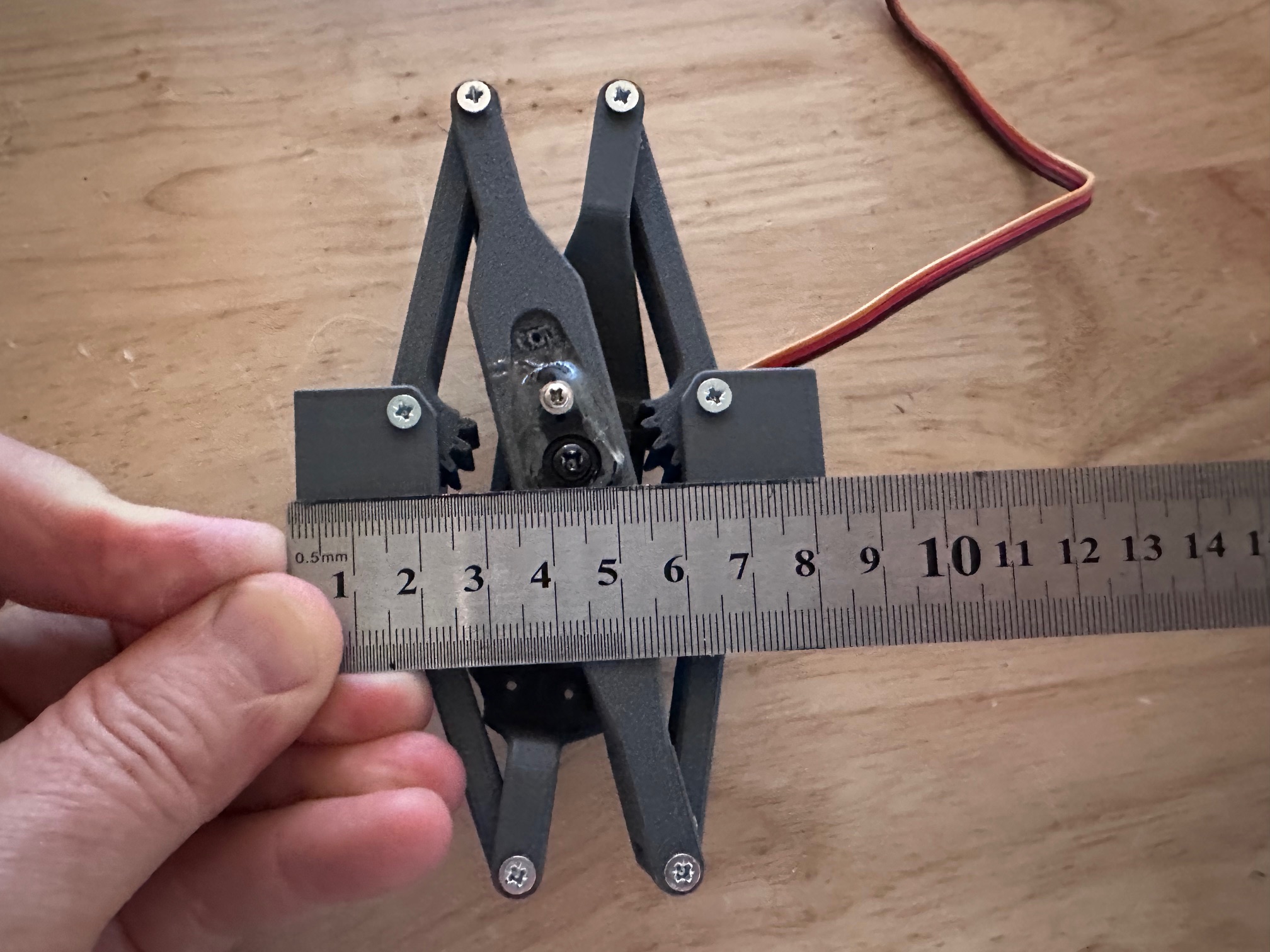
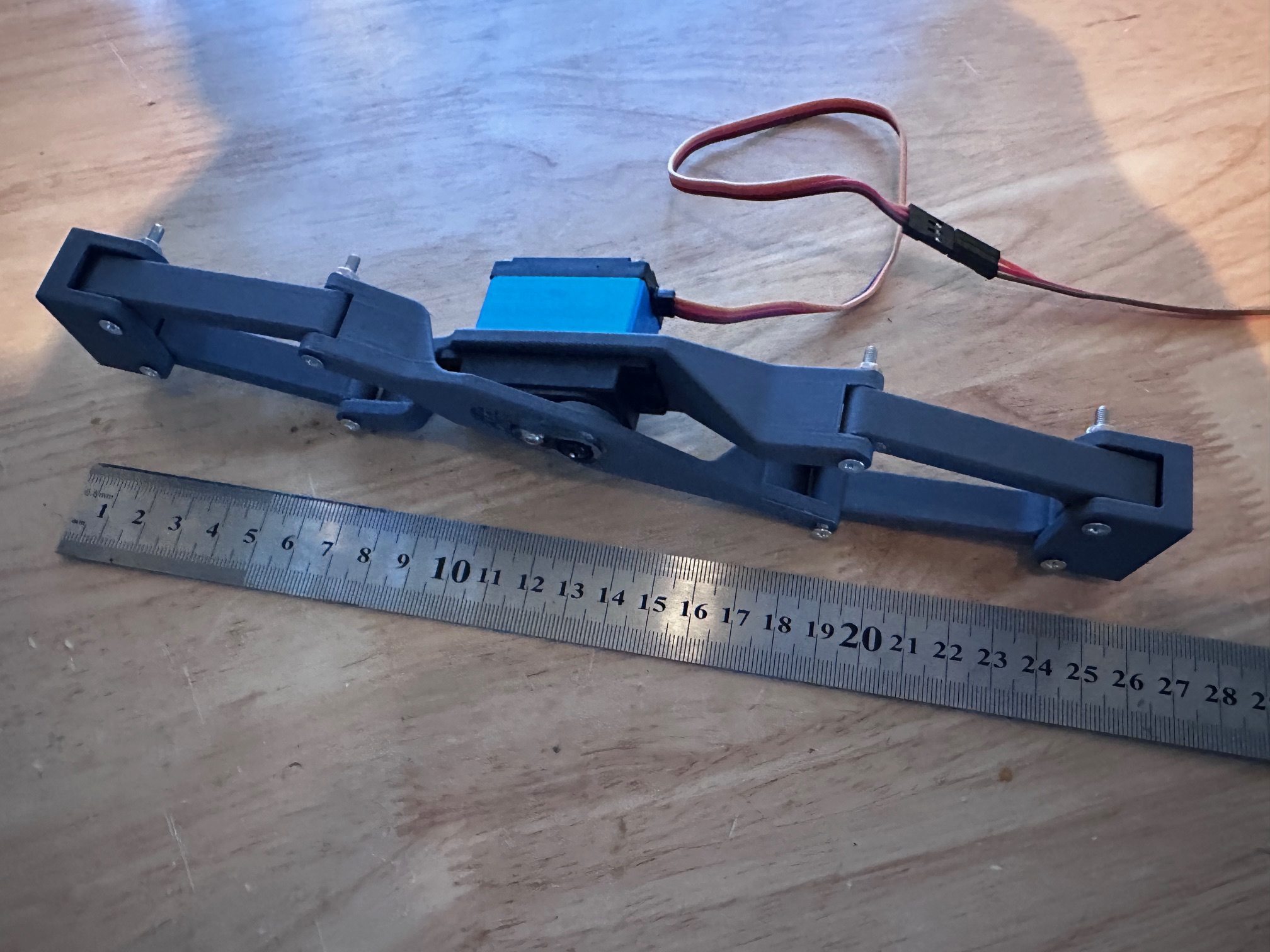
De servo die ik gebruik is een zogenaamde ‘Standard Size’ servo, met afmetingen van 40x40x20mm. Mijn toegepaste versie heeft een hefvermogen van 25kg/cm. De kosten voor een dergelijke servo variëren van €10 tot €30, afhankelijk van de uitvoering: plastic gear of metal gear en het hefvermogen van 10-60kg/cm. De tijd die nodig is om de schaar van minimale stand naar maximale stand te krijgen is minder dan 2 seconden, waarmee een snelle, redelijk precieze beweging gemaakt kan worden. De draaihoek van de servo is lineair met de uitwijk van de hefboom. En aangezien de servo op graden aangestuurd kan worden, is een eenvoudige calculatie voor een voorspelde beweging mogelijk. Met een gewicht van 66 gram is het geen enkel probleem om de servo onderdeel te laten zijn van de hefboom zelf. Hoewel niet erg accuraat, kan ik met deze demo-opstelling een repeteerbare nauwkeurigheid realiseren van ongeveer 2% over een verplaatsing van 18 centimeter.
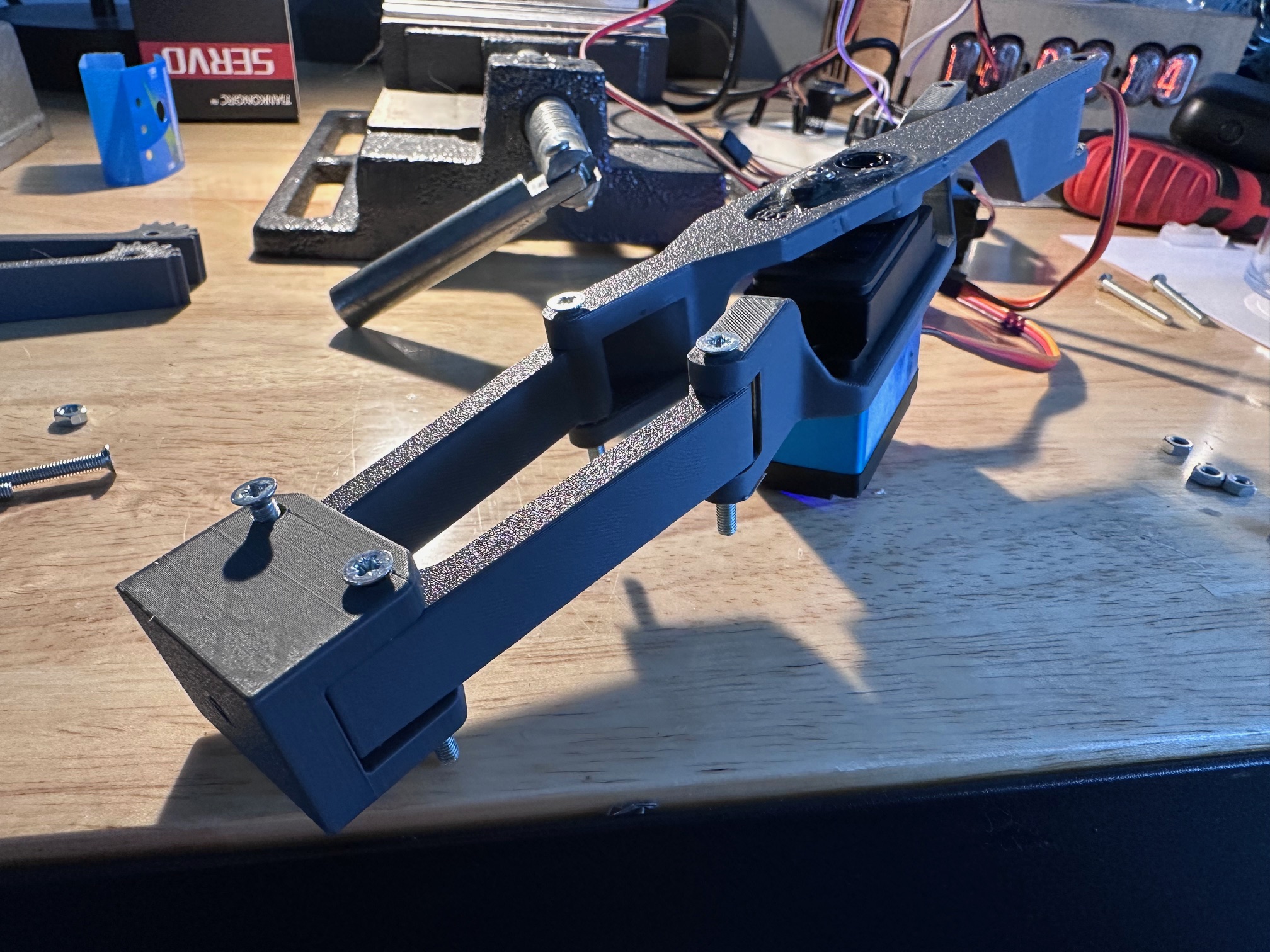
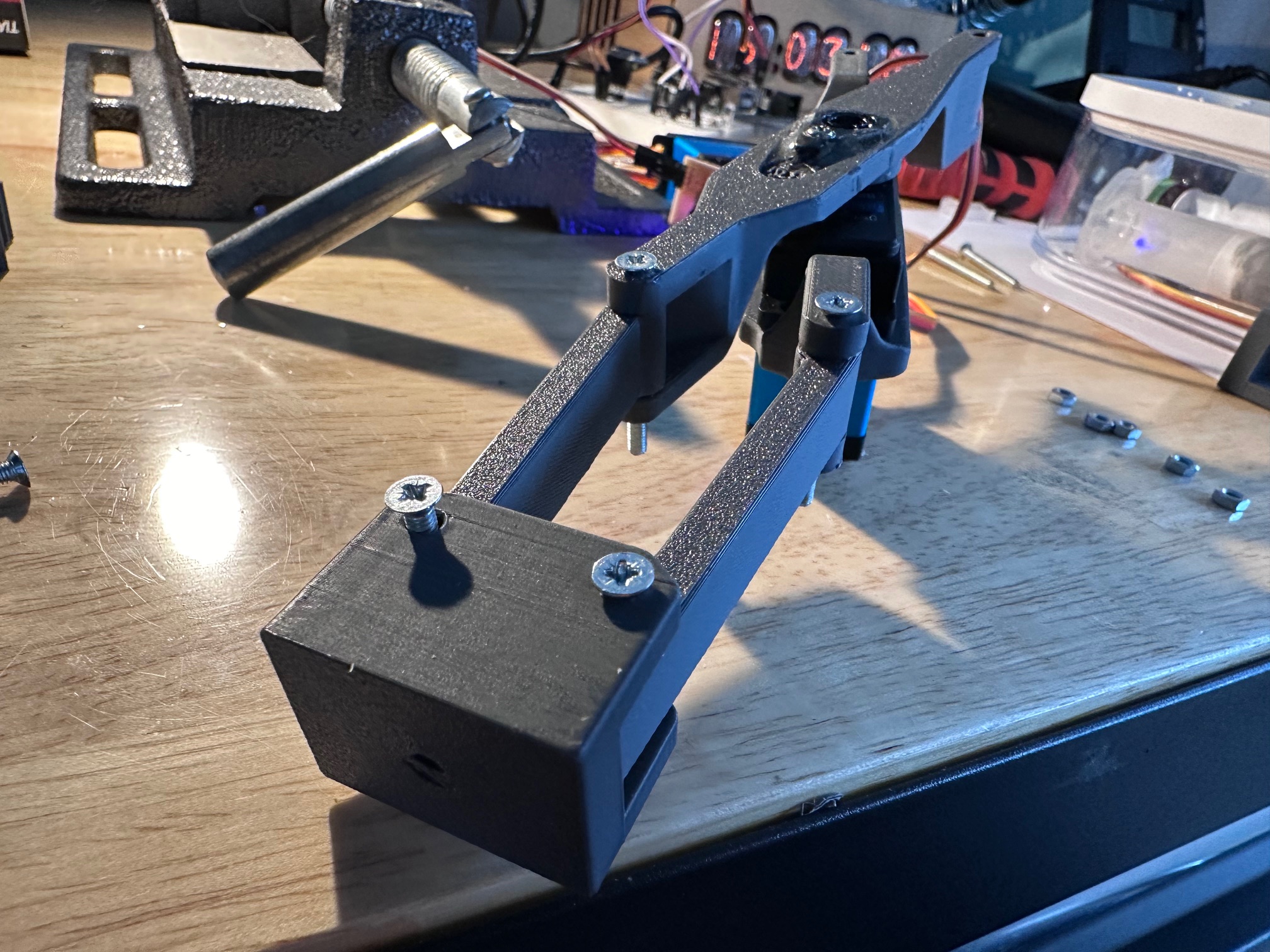
Het 3D-ontwerp van de hefboom heb ik op de 3D-printer uitgevoerd in PLA. Dit materiaal is voldoende sterk voor de hefboom en is bovendien binnen afzienbare tijd geprint. Het monteren van de arm op de servo vereist wat maatwerk. Na het verwijderen van de nodige support, is de hefboom eenvoudig te monteren met 8 boutjes en daarna direct inzetbaar. Voor het fixeren van de moertjes heb ik bij gebrek aan Loctite een kleurrijke nagellak gebruikt.
Deze proof of concept is een succes. Op snelle wijze heb ik een aantoonbaar demonstratiemodel van de hefboom gemaakt. Door het dimensioneren van de gebruikte aandrijving en het aanpassen van de afmetingen van de hefarmen is het mogelijk een voorspelbare oplossing te maken. Dit soort proof of concepts zijn leuk om te maken en vooral ook erg handig als demonstratiemodel. De werking is meteen inzichtelijk en als conversatiestarter leidt het direct tot concrete vragen over dimensionering en haalbaarheid. Een solide oplossing vereist doorgaans een ander type aandrijving. En de aansturing van een encoder gebaseerde positionering is uiteraard veel preciezer. Maar voor het doel van vandaag is dit voor mij een passende oplossing.