20 november 2022
In 2015 had ik de mogelijkheid om in Japan in de Tokaido Shinkansen high-speed “bullet train” van Tokio naar Kyoto te reizen. De snelheid van deze bullet trein is indrukwekkend doordat een magnetisch veld de zwaartekracht compenseert en er slechts luchtwrijving te overwinnen is. Tijdens deze treinreis werd mij duidelijk dat zweven door magnetisme enorme mogelijkheden biedt.
Door een soort van compenseren van de zwaartekracht komt een object zwevend in de ruimte te hangen, gecontroleerd door een computergestuurd magnetisch veld. Hall sensoren meten de actuele positie van de magneet in het zweven object en sturen de positie bij door magnetic coils. In mijn eigen opstelling ben ik zo in staat een object van zo’n 500 gram vrij te laten zweven op een afstand van zo’n 20mm.
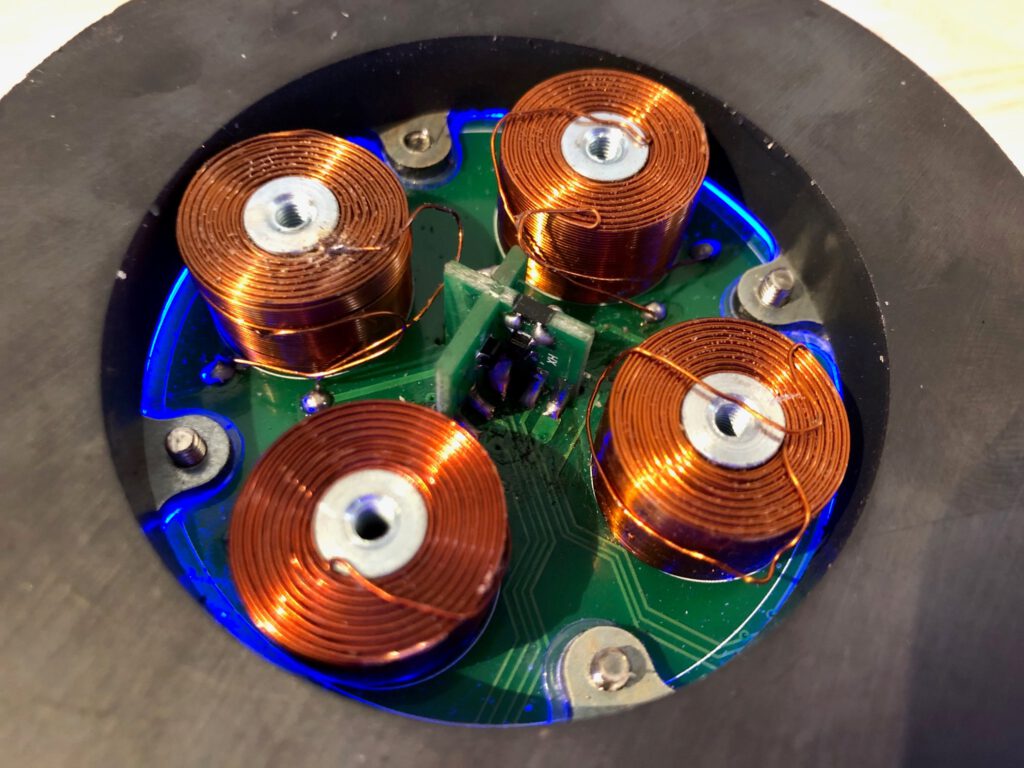
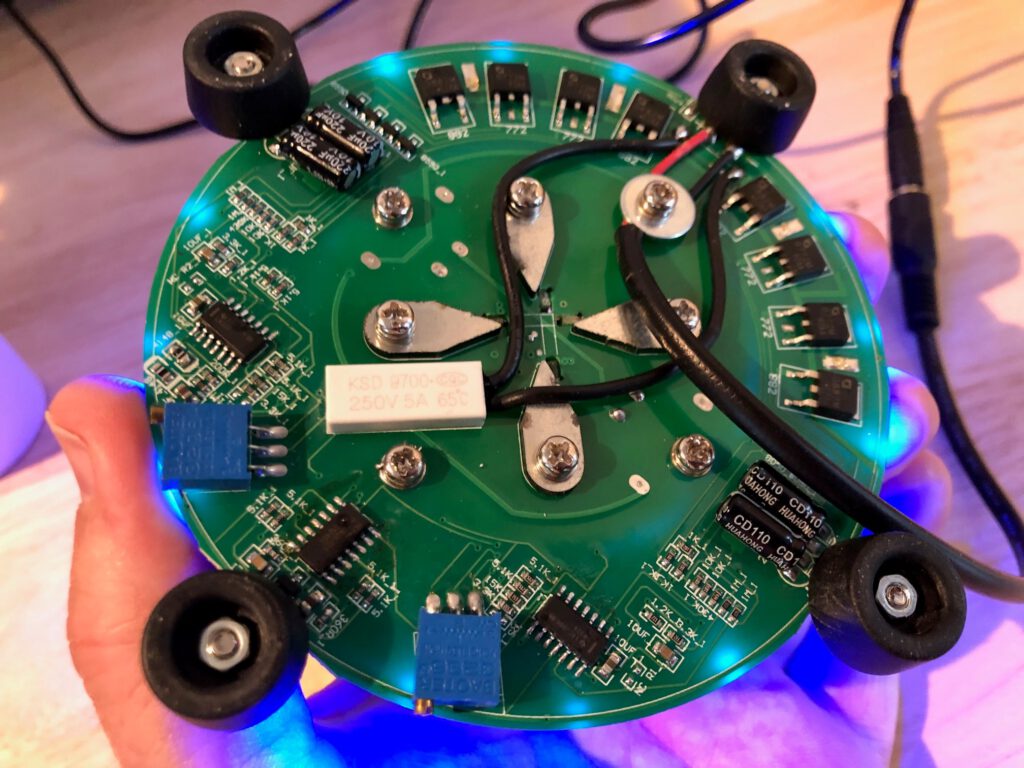
De grote ronde magneet op de base plate zorgt voor een permanente magnetisch veld van afstoting. Binnen deze ronde magneet bevinden zicht 4 individueel MOSFET gestuurde magnetic coils. Deze coils zorgen voor een computer gestuurd compensatieveld, waarmee het object aangetrokken wordt. Twee hall sensors meten de positie en sterkte van het magnetische veld en sturen de MOSFETS aan. Doordat de magnetic coils individueel aangestuurd worden, is het ook mogelijk om het object de laten draaien. Hiervoor wordt om beurt een iets sterkere aantrekking door één van de magnetic coils gestuurd, waarmee een roterende beweging ontstaat – een soort van stappenmotor.
Als proof of concept (POC) is deze magnetic leviatie opstelling leerzaam, leuk en vooral handig als praktisch studiemodel. Toepassingen voor magnetic levitation zijn talloos. Zweven en roterend kan het toegepast worden voor het ronddraaien van spullen in winkelvitrines, kunst-opstellingen met dynamiek, maar ook als pomp, turbine, generator of in laboratoriumopstellingen waarbij er er geen fysiek contact kan zijn met bewegende onderdelen. Maar ik zie ook mogelijkheden in de vorm van een kogellager, zonder kogels waarbij vrije beweging in de ruimte gecontroleerd mogelijk gemaakt wordt.