
2 April 2026 –
Op 26 maart ben ik in Groningen bij BuildinG, sessie 2B: Robots in de bouw. Op 2 april in Den Bosch bij GRASSO-Talks, thema Physical AI en humanoids. Twee verschillende events, twee verschillende publieken — maar dezelfde onderliggende vraag: wat kunnen autonome robots nu écht?
Wat heb ik gebruikt / gezien
– Unitree Go2 – MANCS / Hanze
– Unitree Go2 – Sparky SPARK Campus
– Unitree Go2W – Kai / JAJO–Hercuton/SPARK Campus/BotBerg
– Humanoid – Bob BREiNN / Breman Innovatie
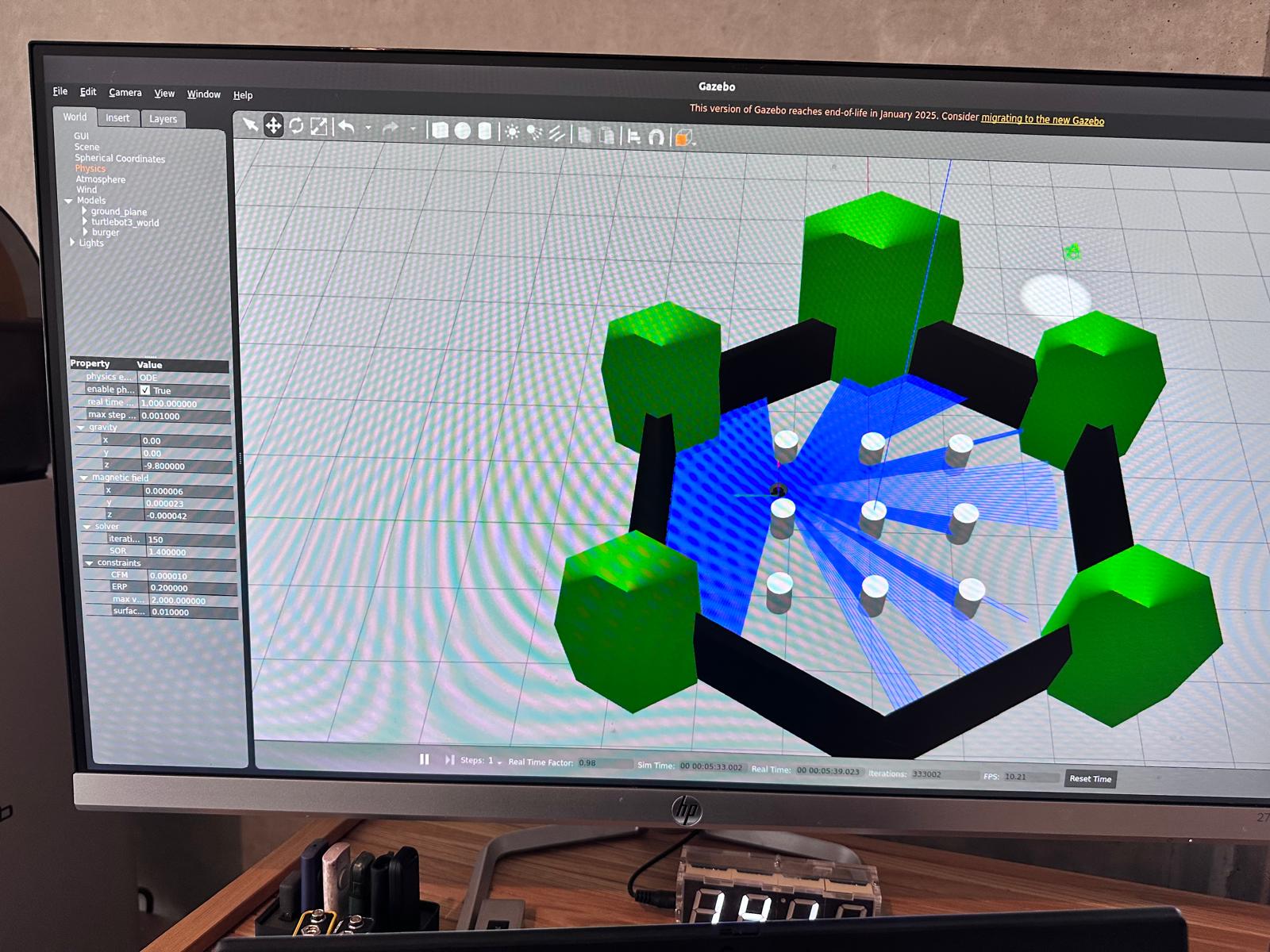
– ROS2, Gazebo, RViz, Nav2
– IMU trillingssensoren (Hanze scenario-dashboard)
– BuildinG, 26 maart, Groningen
– GRASSO-Talks, 2 april, ‘s-Hertogenbosch (IKDB / SPARK Campus)
Ik werk zelf aan het antwoord. Samen met JAJO en Hercuton ontwikkel ik vanuit de SPARK Campus Kai — een Unitree Go2W quadrupe— voor autonome inspectie op de bouwplaats. Wat ik op beide events zie en hoor, herken ik direct vanuit de praktijk.
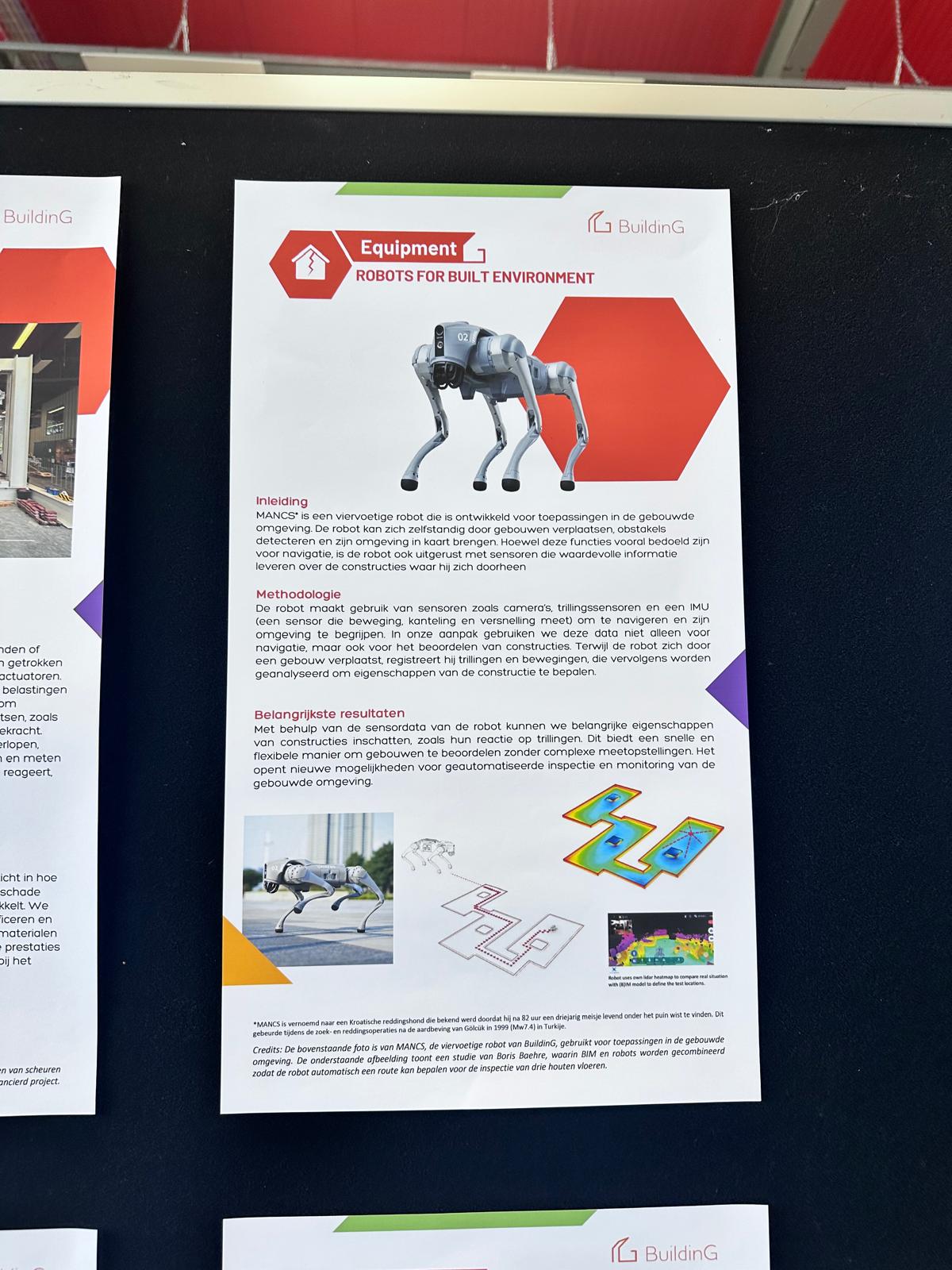


BuildinG Groningen — MANCS op het podium
In Groningen presenteert de Hanzehogeschool MANCS — ook een Unitree Go2, net als Kai. De robot loopt over een testopstelling van houten vloerplanken met niveauverschillen. De IMU-trillingssensor meet vloervibraties terwijl de robot loopt — zichtbaar op een live Hanze scenario-dashboard.
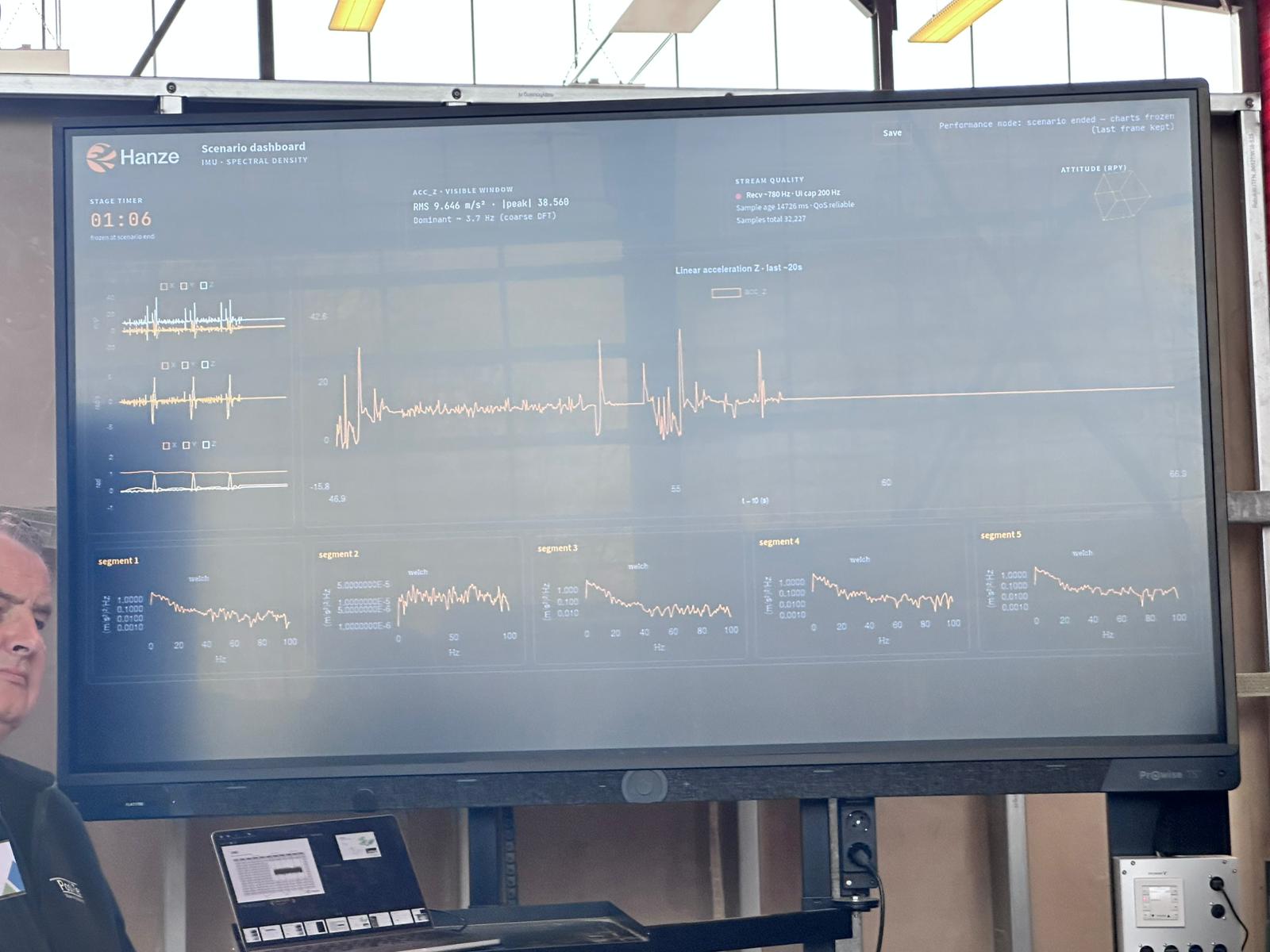
De data stroomt live binnen: RMS-versnelling, spectrale dichtheid per segment, dominante frequentie. Het ziet er indrukwekkend uit. En dat is het ook — maar het is tegelijk een herkenning: dit is precies waar de complexiteit zit. De robot loopt. De sensor meet. Maar de stap naar volledig autonoom — zelfstandig navigeren, zelfstandig beslissen waar te meten, zelfstandig rapporteren — die stap is nog niet gemaakt.
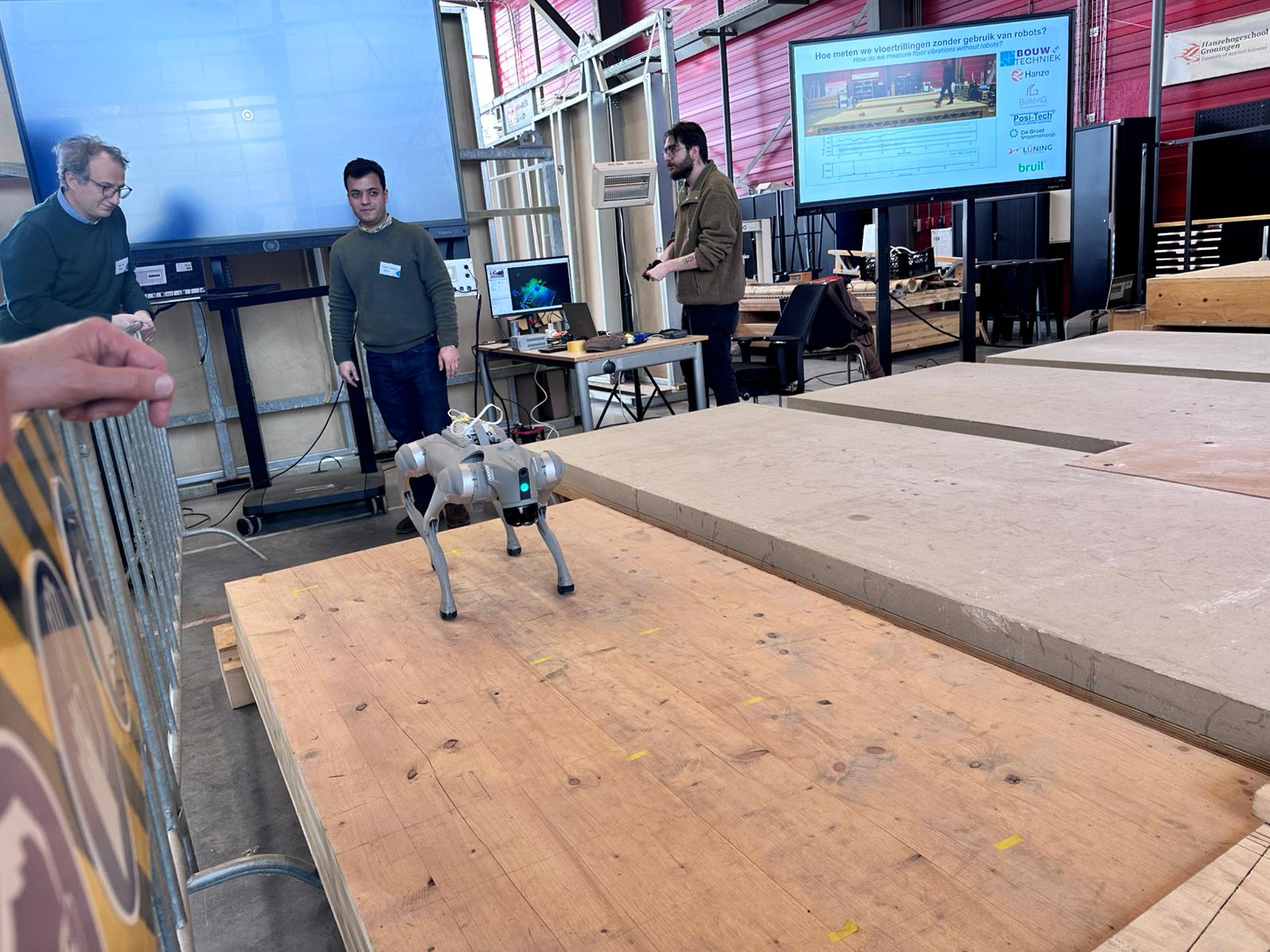

De foto’s zeggen genoeg. Op één moment loopt de robot zelfstandig. Op het volgende moment hurkt een begeleider ernaast om hem over een richel te helpen. Autonoom is een spectrum — en we zitten allemaal nog in het midden ervan.
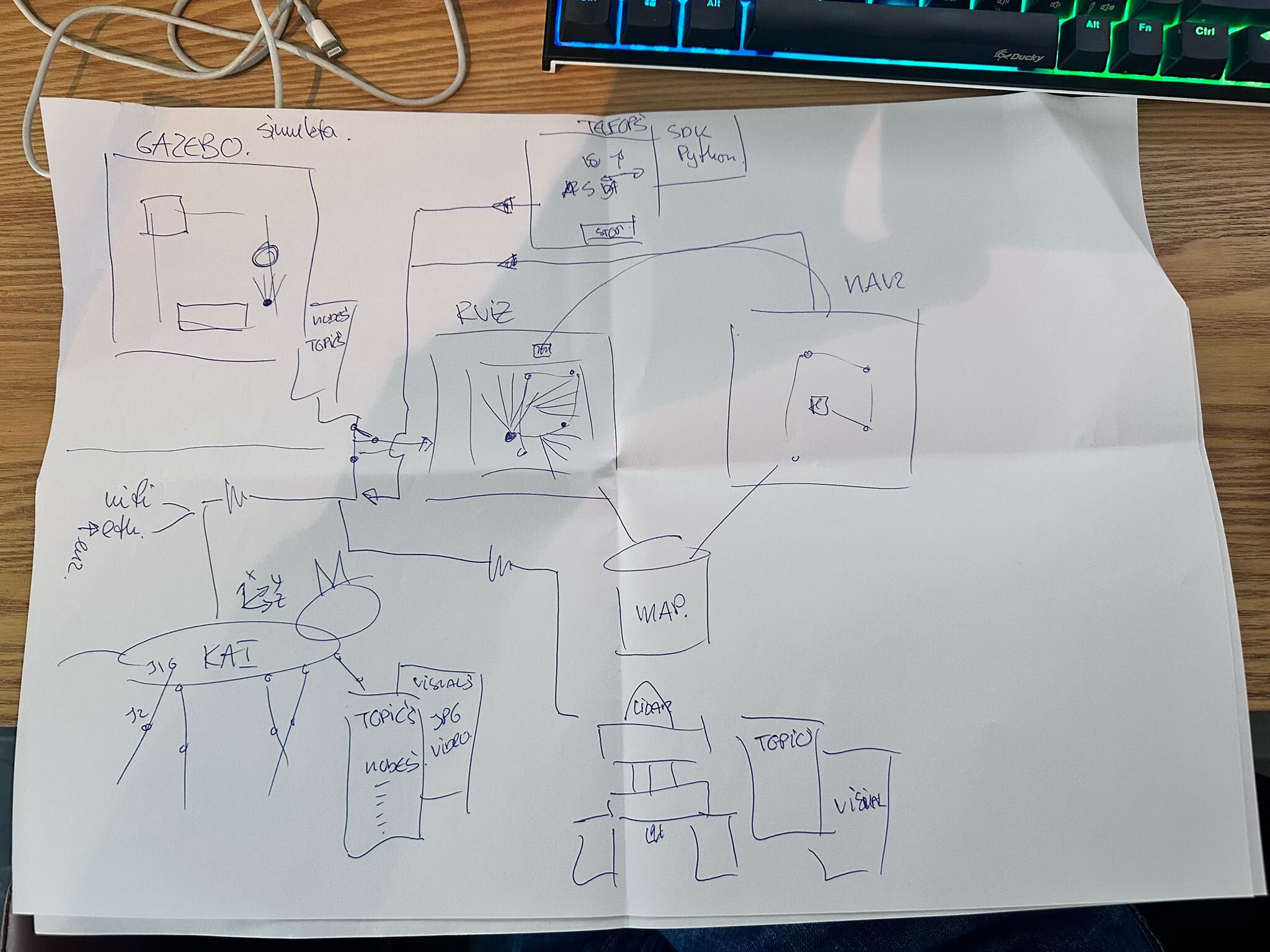
De stack achter de robot
Wat drijft deze robots? Open source. ROS2, Gazebo, RViz, Nav2 — tools die grotendeels uit universiteiten en de open source gemeenschap komen. Geen kant-en-klare oplossing die je installeert en deployt. Het is een gereedschapskist — krachtig, maar je moet weten hoe je ermee werkt.

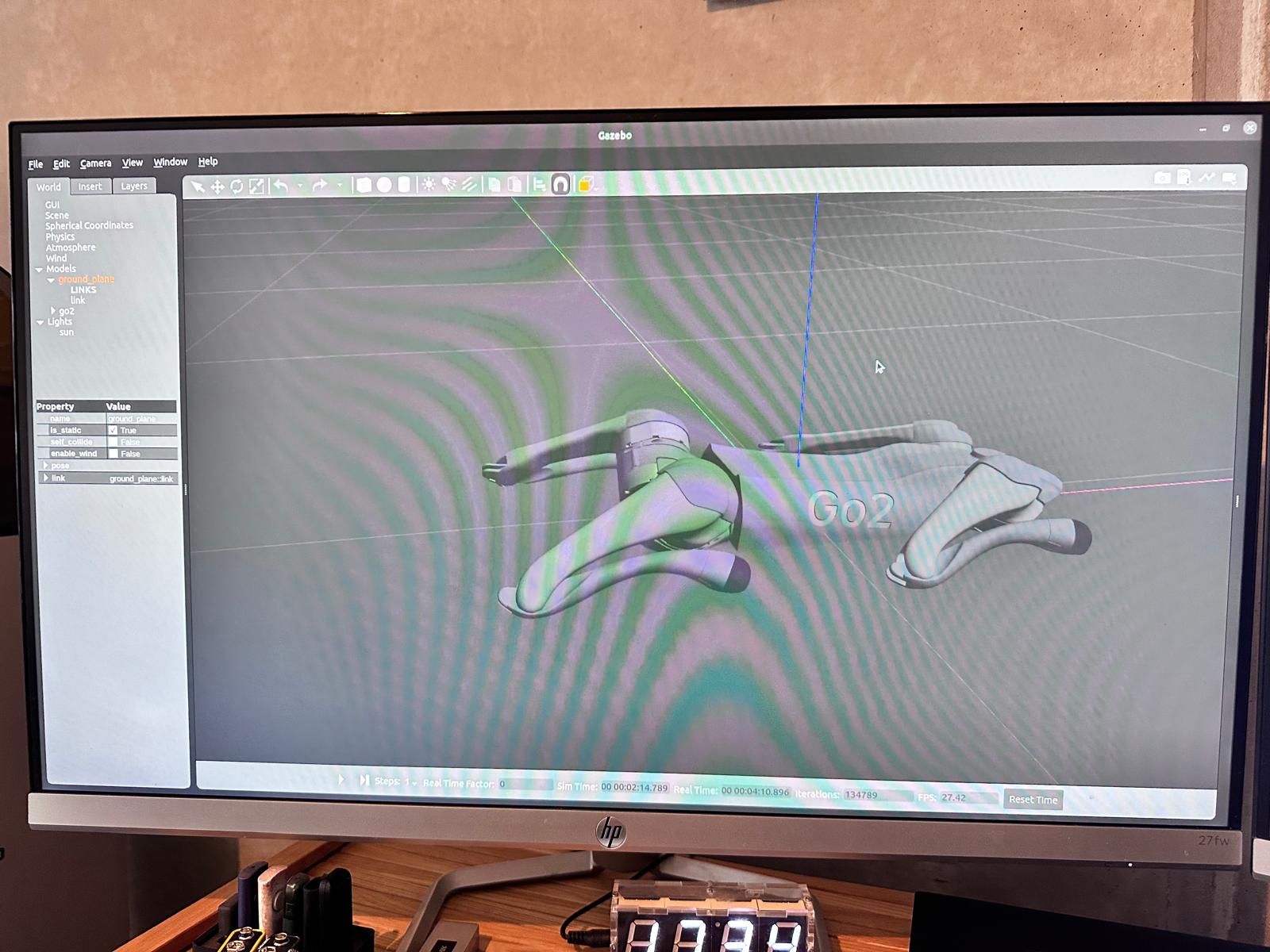
Ik herken dit vanuit mijn eigen werk aan Kai. De simulatie in Gazebo werkt. Het Go2-model staat erin. Maar de stap van simulatie naar echte autonome navigatie op een rommelige bouwplaats — met stof, kabels, onverwachte obstakels — is een andere wereld. Nav2 vereist goede kaarten, betrouwbare odometrie, tuning van parameters. SLAM werkt in een lab. Op een bouwplaats is het een ander verhaal.

GRASSO-Talks Den Bosch — Physical AI in het wild bij het IKBD – Innovatie Kwartier Den Bosch
Bij GRASSO in het IKDB Den Bosch is de toon anders. Hier geen laboratoriumopstelling maar een keynote-setting — zakelijk publiek, bestuurders, innovatiemanagers. Patrick van Stokhem van BREiNN (Breman Innovatie) geeft een kompacte keynote over Physical AI. De boodschap: AI komt de fysieke wereld in. Het analyseert niet alleen meer — het handelt.


Dan de live demo. Humanoid Bob — een tweebeinige robot van BREiNN — zit letterlijk op de bank. Kai en Sparky liggen ernaast op het kleed. Drie robots, twee paradigma’s. Bob is imposant en trekt alle aandacht. Kai en Sparky zijn kleiner, maar dichter bij de toepassing. Het publiek is enthousiast. Vragen over toepassingen, over tijdlijnen, over wat er nu al kan. Cassandra Vugts van SPARK verbindt het aan talentontwikkeling — want de vraag is niet alleen wat robots kunnen, maar ook wat mensen nodig hebben om er goed mee te werken.
Wat ik meeneem
Twee events, één patroon. De interesse is enorm. De technologie is beschikbaar — hardwarekant grotendeels opgelost, softwarekant volop in ontwikkeling. Maar de use-cases zijn nog zoekende. Iedereen ziet potentie, niemand heeft de perfecte toepassing al volledig uitgerold.

Dat is geen kritiek — het is de realiteit van een jonge technologie. En het is precies waarom samenwerking telt. Bij BuildinG zit onderzoek (Hanze), techniek en bouw bij elkaar. Bij het IKDB – GRASSO zitten commerciële partijen, onderwijs en innovatieplatforms in dezelfde ruimte. Dat zijn de omgevingen waar use-cases worden gevonden — niet in het lab, maar in de combinatie van mensen die allemaal een ander stuk van het vraagstuk kennen.
Voor Kai betekent het: blijven bouwen. De simulatie verder verfijnen. De navigatiestack stabiel krijgen — want een robot op de bouwplaats is pas zinvol als degenen die op die bouwplaats werken er ook iets aan hebben.