6 mei 2021
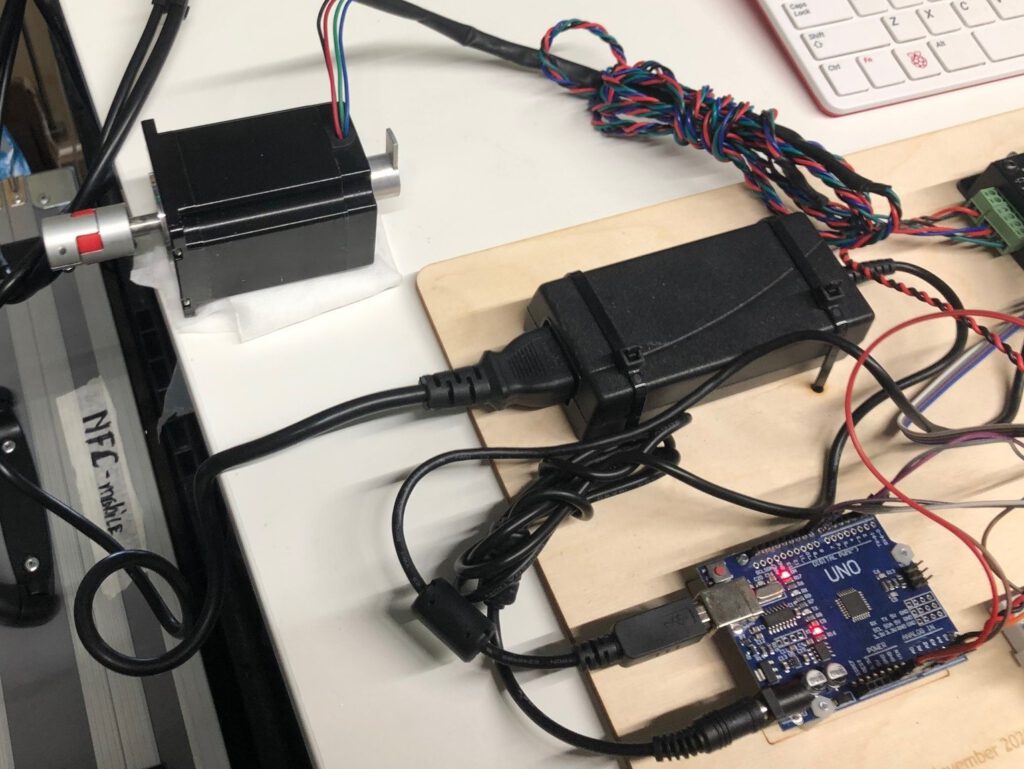
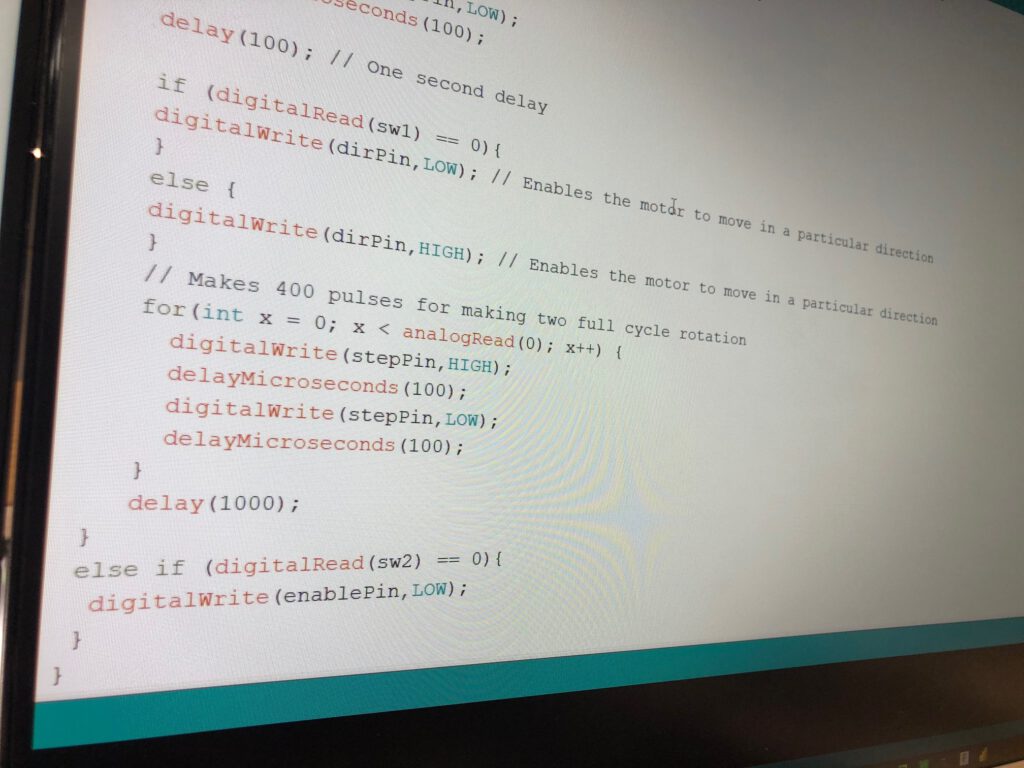
Het aansturen van motor met repeterende, gecontroleerde bewegingen kan prima geregeld worden met behulp van een stappenmotor in combinatie met een stappenmotor driver. Stappenmotors werken in de basis vanuit drie signalen: stap, richting en enable. Deze drie pulstreinen geven de instructie voor beweging, richting en het wel/niet vasthouden van de positie.
Binnen de Arduino omgeving is er een rijke variëteit aan implementaties beschikbaar waarin naast basisacties ook gestuurd kan worden het accelereren en afremmen van de beweging. Door het juiste aantal stappen aan te sturen is de precieze bewegingshoek van de stappenmotor te regelen. Echter wanneer de torque – kracht – van de motor de beweging niet ondersteund, kan het zijn dat er stappen opgeslagen worden.
De implementatie voor de onderstaande stappenmotor heeft als doel snel – binnen 1 dag – te kunnen valideren of een bepaalde beweging repeterend ingezet kan worden in een nieuw te ontwikkelen productielijn. Door slim data te verzamelen en modulair te programmeren is het mogelijk om efficiënt een rapid prototype te ontwikkelen en de testopstelling op basis van verzamelde data te valideren.