2 juni 2021
Unmanned Guided Vehicles (UGV) zijn een steeds realistischer toekomstbeeld. Onbemande, zelfsturende mobiele objecten zoals de PiCar-V kunnen autonoom opdrachten uitvoeren en daarmee processen ondersteunen. Alhoewel nog in der kinderschoenen, blijkt het mogelijk om met bestaande open-source ontwikkelplatforms een autonoom sturend en rijdende auto te realiseren en deze vanuit programmacode vooraf bepaalde taken uit te laten voeren.
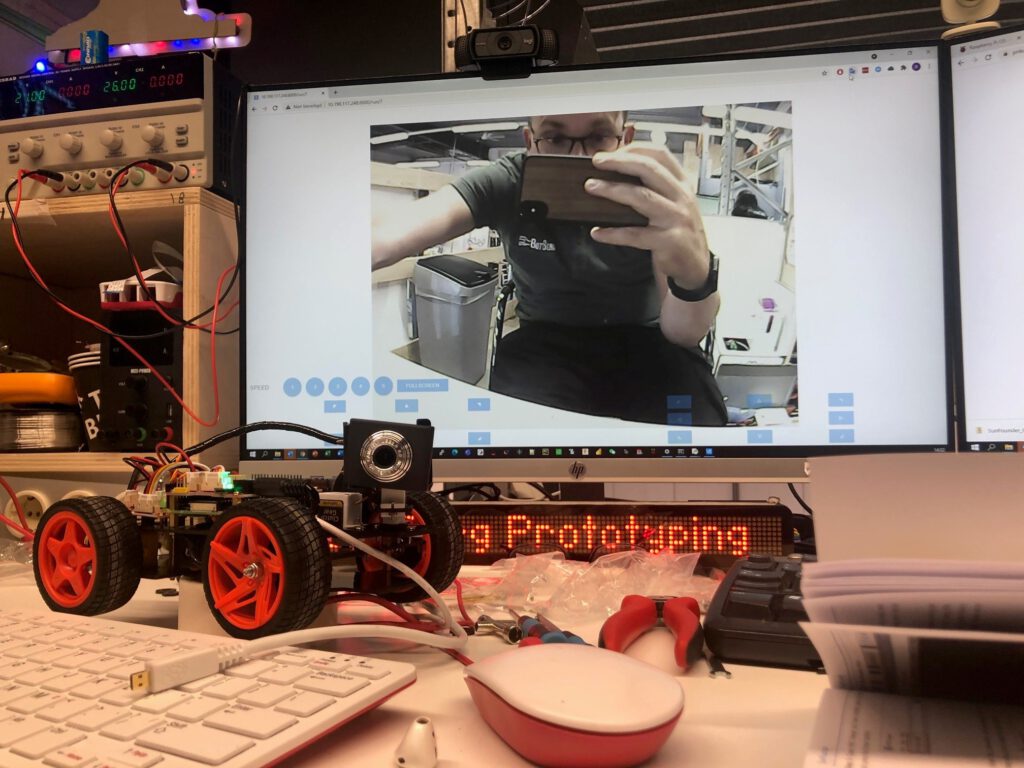
Het hart van deze PiCar is een Raspberry Pi model 4 8Gb, voorzien van een 120° USB camera. De PiCar heeft twee onafhankelijk aangedreven achterwielen en een servogebaseerde stuurinrichting. Twee 18650 accupacks leveren voldoende energie om zowel de Raspberry als de motoraandrijving, servostuurinrichting als camerabediening aan te sturen.
Met OpenCV en bijvoorbeeld TensorFlow kan een generieke autoplatform neergezet worden welke gevoed kan worden met zowel pretrained TensorFlow modellen als eigen modellen. Hiermee kan een experimentele omgeving neergezet worden waarmee de UGV autonoom aan de slag gaat. In mijn geval volgt de PiCar een rood rond object en blijft deze volgen op een vooraf ingestelde afstand. Het PiCar platform biedt daarnaast via I2C talloze mogelijkheden om sensoren, schakelaars en actuators te verbinden.